An Efficient Mechanism for Establishing Connectivity in Wireless Sensor and Actor Networks Fatih Senel and Kemal Akkaya
Mohamed Younis
Department of Computer Science Southern Illinois University Carbondale Carbondale, IL 62901
[email protected],
[email protected]
Dept. of Computer Science & Elect. Engineering University of Maryland Baltimore County Baltimore, MD 21250
[email protected]
Abstract—Wireless Sensor and Actor Networks (WSANs) employ powerful and mobile actor nodes that can perform application specific actions based on the received data from the sensors. As most of these actions are performed collaboratively among the actors, inter-actor connectivity is one of the desirable features of WSANs. In this paper, we propose a novel distributed algorithm for establishing a connected inter-actor network topology. Considering an initially partitioned actor network with intra-connected sub-networks, our algorithm pursues a coordinated actor movement in order to connect the subnetworks. The goal of this movement is to both minimize the total and maximum travel distances of the individual actors. Our algorithm considers the minimum connected dominating set of each sub-network when picking the appropriate actor to move so that the connectivity of each sub-network is not violated. We analytically study the performance of our algorithm. Extensive simulation experiments validate the analytical results and confirm the effectiveness of our approach. Keywords-wireless sensor and actors; connectivity; actor movement; energy efficiency.
I.
INTRODUCTION
In recent years, wireless sensor and actor networks (WSANs) have emerged as a new type of ad hoc networks that can be deployed as fully automated systems [1]. Such automation is ensured through resource rich and mobile actor nodes which can collect data from sensors, make decisions and perform certain actions without any human intervention. Examples of possible actor nodes include Unmanned Vehicles, Robotic Mule [1], an autonomous robot designed for the Army to detect mines in the battlefield, SKIT and Mini-robot which are expected to totally replace the soldiers in the battlefields [1] and the NASA JPL miniaturized rover [2]. WSANs have the potential to be used in numerous applications such as detecting and countering pollution in coastal areas and forest fires, deterring terrorist threats to ships in ports, urban search and rescue, destruction of mines in different environments, etc. In these applications, one of the most important issues is being able to provide services at the right time. However, in order to provide the desired effects, the actor nodes often require making collaborative decisions on which and how many actors to pick for a coordinated action. For instance, in a forest monitoring application sufficient number of actors capable of acting as water sprinklers or gas extinguishers need to be engaged as rapidly as possible to control a fire and prevent it from spreading. This suggests that the deployed actors should be able to exchange messages among each other
for managing a coordinated action. Therefore, a connected inter-actor network should be established at setup time. However, inter-actor connectivity may not always be possible in WSANs as actors are deployed in fewer numbers than sensors due to their high costs and their deployment may not be deterministic. For some harsh environments actors may be randomly dropped by aircraft, which can easily lead to having a partitioned inter-actor network. In such cases, a post deployment actor repositioning may be needed to ensure interactor connectivity as required by most WSAN applications. The same applies when recovering from an actor’s failure that causes a partitioning of the inter-actor network. A possible solution to the partitioning problem would be to exploit the mobility of the actor nodes; basically moving some of the actors of one partition towards the other partitions. However, as the mechanical parts consume significant energy, the movement of actors should be carefully planned in order to limit the impact on the lifetime of the involved actors. In this paper, we present an efficient distributed movement mechanism that connects the partitioned sub-networks and thus achieves inter-actor connectivity. The idea is to pick the closest actors in the separated sub-networks and move them towards each other until a communication link can be established. However, since such movement may disconnect the repositioned actors from their sub-networks, our approach will pick additional actors from each sub-network for performing cascaded movements in order to maintain the intra-sub-network connectivity. The collective effect is like stretching the topology of the participating sub-networks towards each other. The objective of the cascaded movements within a sub-network is twofold. First, we opt to minimize the number of movements and thus the total travel distance of the involved actors. Second, we care for each individual actor and thus strive to minimize the maximum distance an actor will travel. Both objectives are geared for reducing and balancing the actor’s load and thus extending the WSAN’s lifetime. In order to pick the appropriate actors for the cascaded motion, we consider the minimum connected dominating set (MCDS) of the individual sub-networks. As long as the MCDS is maintained for a network, the effect of relocating a node will be limited to itself and would not risk the connectivity of the other nodes in the network. Therefore, our approach opts to reposition non-MCDS actor nodes. However, such repositioning is done in a cascaded way by replacing multiple nodes in order to minimize the maximum distance a node will move. We compared the performance of our
1129 1930-529X/07/$25.00 © 2007 IEEE This full text paper was peer reviewed at the direction of IEEE Communications Society subject matter experts for publication in the IEEE GLOBECOM 2007 proceedings.
approach to block movements where the whole sub-networks are moved towards each other until they merge into one network. The simulation results confirmed the effectiveness of our approach and its superiority to block movements. This paper is organized as follows. In the next section, we discuss related work in the literature. Section III describes the problem and presents our approach in details. The performance of our approach is evaluated in section IV. Section V concludes the paper. II. RELATED WORK Recent research on WSANs mostly focused on coverage and positioning problems. Connectivity has been studied in the context of positioning the actors. The goal of [3] is to maximize the coverage of actors without violating connectivity. This is done by exploiting the mobility of actors, as we do in this paper. The idea is to model repelling forces among actors and from the boundaries of the deployment area so that the actors will spread for better area coverage. However, the approach does not handle network partitioning problems. A similar work for maintaining connectivity in robot networks is studied in [4]. The goal is to sustain twolevel of connectivity even under link or node failure. The approach is based on moving some of the robots in case of failure to restore 2-connectivity. While the idea of movement of robots is similar to ours, it is performed based on contraction forces and block movements and geared for twolevel connectivity which is not our concern in this paper. Repositioning of mobile sensors has also been exploited to counter holes in coverage caused by sensors failure [5]. The idea is simply to identify some spare sensors from different parts of the network that can be repositioned in the vicinity of the faulty nodes. Since moving a node for a relatively long distance can drain significant amount of energy, a cascaded movement is proposed if there are sufficient number of sensors on its way. The idea is to determine intermediate sensor nodes on the path and replace those nodes gradually. While, our work is similar in the sense that we use cascaded movements, connectivity is not considered in [5]. Movement of actors has also been studied in the context of its impact on sensors. For instance in [6], a mechanism to efficiently handle the mobility of actors is presented. This mechanism limits the broadcasts of actors for location updates within the Voronoi diagram of surrounding sensors. Sensors predict the movement of actors based on Kalman filtering of previously received updates. In this way, the energy consumption of sensors for keeping track of the locations of actors is reduced significantly. Our focus is rather to minimize the mechanical energy consumption of actors in movement at network setup time or to recover from a failure. III. ACTOR MOVEMENT FOR ESTABLISHING CONNECTIVITY A. Problem Definition Our problem can be defined as follows: “N actors that know their locations are randomly deployed in an area of interest. Let us assume that j sub-networks which are intra-connected
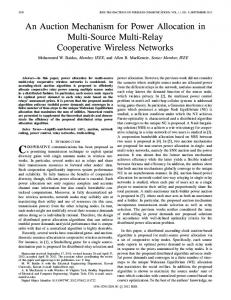
are formed as a result of this deployment. Each sub-network Gi has Ni actors, where 0 2 or the leading node is a dominator with at least one dominatee and ei ≥ 2. Proof: As far as the TMA is concerned, block movement will get all of the nodes in Gi to move di, leading a TMA of Ni di. In our approach when the leading node is a dominator and performs one step, a dominatee of this node is picked to replace it. If it does not have a dominatee or it is a dominatee, all the other dominators are explored to pick a dominatee to replace it, causing cascaded movements. In the worst case, the leading node is a dominatee and only the last dominator has such a dominatee. In other words, it is a
line topology with ei=2 and the leading node is a dominatee. Therefore, this will cause cascaded movements of distance of Nir. Assuming di/r steps, the TMA will be Nirdi/r=Nidi which is same as the block movement as seen in Fig. 3(a). However, if the leading node is a dominator with a dominatee, then the first step will require a moving distance of 2r in the line topology. This will lead a TMA less than Nidi (Fig. 3(b)). If there are 3 dominatees, in the worst case 2 of them stay at each end of a line topology and the third one can be a dominatee of the last dominator. This node can be picked in the last step and will create Ni-1 movements thus keeping the moving distance less than Nir. This will result in a TMA which will be less than Nidi again (Fig. 3(c)).
As far as the message complexity is concerned, our approach is completely local and requires message exchanges only among the neighbors. There are three steps in the algorithm for which messages are exchanged. The first is when MCDS is being calculated. We used the distributed algorithm of Dai and Wu [7], which requires 2-hop neighbor information for a node. Therefore, a node sends 2 messages in order to determine whether it will be a dominator or a dominatee. After the MCDS is determined, nodes start sending messages to perform the movements and update the MCDS. Each node broadcasts a LEAVE message to its neighbors before it leaves. If this is a dominator with no dominator neighbor, it waits for the messages from its dominatees before deeming repositioning a necessity. Therefore, it broadcasts another message after it hears from all of its dominatees. Finally the node broadcasts a third message ARRIVED to its new neighbors when it reaches to its new location. Therefore, depending on the number of steps di/r, a node will send a maximum of 3(di /r) messages. As a result, in the worst case a node will totally send 2 + 3(di/r) messages. Given that di=(d-r)/2 then the message complexity will be O(d/r).
Figure 3. (a) is the worst case where block movement would have a TMA of 4*d = 8r which is same as our approach. However, in (b) and (c) block movement would have TMAs of 8r and 10r respectively which are more than the TMA in our approach.
1132 1930-529X/07/$25.00 © 2007 IEEE This full text paper was peer reviewed at the direction of IEEE Communications Society subject matter experts for publication in the IEEE GLOBECOM 2007 proceedings.
IV.
EXPERIMENTAL EVALUATION
In the experiments, we created connected inter-actor networks consisting of varying number of actors (20 to 100) randomly placed in an area of interest of size 800m × 800m. For each network, we determined the rightmost node as the leader node and moved it for a fixed distance of 600m towards south-east. The movement is performed by just updating the location of an actor node. The maximum transmission and action ranges for an actor node are assumed to be 50m and 30m respectively. We used Total Movement distance of all the Actors (TMA) and Maximum Movement distance of an Individual actor (MMI) as our performance metrics. While TMA represents the total distance traveled by all the actors in the network, MMI is used for the maximum of all the distances moved by all the actors during the establishment of the connectivity. In the experiments, we compared our approach (i.e. MCDS-based Movement) with Block Movement. Each simulation is run for 50 different network topologies and the average performance is reported. Movement Performance: We first compared the MMI of our approach to the block movement scheme under a varying number of actors. As expected, the MMI is exactly same as block movement. The figure is omitted due to space constraints. Note that this result was also proved analytically in Theorem 1. Since MMI depends on the distance to be traveled, it does not change when the number of actors increases. In the same experiments, we also recorded the TMA. The results shown in Fig. 4 confirmed that our approach significantly reduces the TMA when compared to the block movement. In fact, in our approach the TMA stayed almost constant regardless of the network size indicating the scalability of our approach. The block movement scheme increases the TMA linearly when the network grows. These results are consistent with Theorem 2. We also conducted experiments in order to investigate the effect of the inter-sub-networks distance (d) and the transmission range (r) on our approach. First, we varied d and observed the TMA. The results shown in Fig. 5 indicated that our approach outperforms the block movement scheme regardless of the value of d. The superiority of the performance is more obvious with smaller values of d (e.g. up to 150% reduction). When d was further increased, our approach started to converge to a line topology and move as a block causing a slight decline in the TMA performance. We
V. CONCLUSION In this paper, we have presented an efficient distributed actor movement mechanism for establishing connectivity in partitioned WSANs. The idea is to relocate the closest nodes named as the leading nodes from each of the sub-networks towards each other until they will be able to communicate so that the movement burden is shared by the involved subnetworks. The movement of leading nodes triggers repositioning of other nodes within the sub-network in order to sustain connectivity. The repositioned actors are picked based on the underlying MCDS. Our approach looks for the closest dominatee to replace the leading node since disconnecting a dominatee does not violate the connectivity. However, rather than relocating the picked dominatee directly to the location of the leading node, we use the idea of cascaded movements for replacement so that the movement load on the individual actors is balanced. Simulation results confirmed that our approach can reduce the total travel distance significantly regardless of the network size while minimizing the maximum travel load on the individual actors. These improvements were achieved with a low message complexity. In the future we plan to extend the approach to handle connectivity of multiple partitions. REFERENCES [1] [2] [3] [4] [5] [6]
[7]
I. F. Akyildiz and I. H. Kasimoglu, “Wireless Sensor and actor networks: Research Challenges,” Elsevier Ad hoc Network Journal, Vol. 2, pp. 351-367, 2004. http://robotics.jpl.nasa.gov/tasks/nrover/ K. Akkaya and M. Younis, “Coverage-aware Connectivity-constrained Actor Placement in Wireless Sensor and Actor Networks,” in the Proc. of IEEE IPCCC’07, New Orleans, LA, April 2006 (to appear). P. Basu and J. Redi, “Movement Control Algorithms for Realization of Fault-Tolerant Ad Hoc Robot Networks,” IEEE Networks, August 2004. G. Wang et al., "Sensor Relocation in Mobile Sensor Networks," in the Proceedings of IEEE INFOCOM, Miami, FL, March 2005. T. Melodia, D. Pompili, I. F. Akyildiz, "A Communication Architecture for Mobile Wireless Sensor and Actor Networks,'' in the Proceedings of IEEE SECON 2006, Reston, VA, September 2006. F. Dai and J. Wu, “An extended localized algorithms for connected dominating set formation in ad hoc wireless networks,” IEEE Trans. on Parallel and Distributed Systems, vol. 15, no. 10, Oct. 2004. 45
90
70 60
80
MCDS-based Movement Block Movement
50
40
MCDS-based Movement Block Movement
70
35 30
40 30 20 10 0 20
40
60
80
100
# of Actors
Figure 4. Comparison of total distance traveled with varying # of actors
TMA (km)
60 TMA (km)
TMA (km)
conducted the same experiment with varying transmission range. The results, depicted in Fig. 6, indicated that the performance of our approach scales with increasing r. This is expected since the number of steps is reduced with larger r values and so is the number of movements and the TMA.
50 40 30
20 15
20
10
10
5
0 400
800
1200
1600
2000
Distance Relocated (m)
Figure 5. Comparison of total distance traveled with varying destination distances (d) for the subnetwork. # of nodes = 40, r = 50m
MCDS-based Movement Block Movement
25
0 50
100
150
200
250
Transmission Range (m)
Figure 6. Comparison of total distance traveled with varying transmission range (r). # of nodes = 40, d = 600m
1133 1930-529X/07/$25.00 © 2007 IEEE This full text paper was peer reviewed at the direction of IEEE Communications Society subject matter experts for publication in the IEEE GLOBECOM 2007 proceedings.