IEEE TRANSACTIONS ON BIOMEDICAL ENGINEtRlNG. VOL 36. ... neural network modeling, neurophysiology, and control systems engi- neering.
IEEE T R A N S A C T I O N S ON B I O M E D I C A L E N G I N E t R l N G . VOL 36. N O
I , J A N U A R Y 1989
Dynamical Neural Network Organization of the Visual Pursuit Svstem J
L. KELLER,
Abstract-The central nervous system is a parallel dynamical system which connects sensory input with motor output for the performance of visual tracking. This paper applies elementary control system tools to extend dynamical neural network models to the visual smooth pursuit system. Observed eye position responses to target motions and characteristics of the plant (eye muscles and orbital mechanics) place dynamical constraints on the interposed neural network controller. In the process of constructing a model for the controller, we show two previous pursuit system models, using efference copy and feedforward compensation, are equivalent from an input-output standpoint. We introduce a controller model possessing a potentially highly parallel implementation and offer an example with supporting neural firing rate data. Changes in time delays or other system dynamics are expected to lead to compensatory adaptive changes in the controller. A scheme to noninvasively simulate such changes in system dynamics was developed. Actual physiologic data of adaptive responses to increased time delay is presented as an example of the utility of this parallel controller. Compensatory changes in our parallel controller model are easily predicted. These results suggest a productive interaction between neural network modeling, neurophysiology, and control systems engineering.
I. INTRODUCTION HE FIELD of neural networks is characterized by explorations of properties of many simple dynamic systems interconnected to collectively form a system which does computation. One common form can be considered to be a function from a set of input vectors to a set of output vectors. These networks serve as associative memories, pattern recognizers, and optimization schemes. Good examples in this area include Kohonen and Oja [ 11, Anderson [ 2 ] , and Hopfield and Tank [3]. Dynamical issues in such systems concern convergence behavior in “training” sessions or convergence in pattern completion or optimization solutions. Less common are neural net applications where dynamics are central to the goal of the network. Here the network is considered to be a functional from a set of inputs (over time) to a set of outputs. Such applications often
T
Manuscript received February 8, 1988: revised July I , 1988. This work was supported by Grants National Eye Institute EY0S913, EY06860. EY06883, and EY06860, the Rachael Atkinson Fellowship, and the SmithKettlewell Eye Research Foundation. D. C . Deno is with the Department of Electrical Engineering and Computer Science, University of Berkeley, CA 94720. E. L. Keller is with the Department of Electrical Engineering and Computer Science, University of California, Berkeley, CA, and the Smith-Kettlewell Eye Research Foundation. San Francisco, CA 941 IS. W . F. Crandall is with the Smith-Kettlewell Eye Research Foundation, San Francisco. CA 941 IS. IEEE Log Number 8824419.
AND
WILLIAM F. CRANDALL
use ideas from control systems engineering. For example, Cannon and Robinson [4] use state feedback and poleplacement to form an integrator from biologically plausible elements. Closer to the present paper is an interesting simulation by Barto et al. [5] of an inverted pendulum controller with parameters “learned” by a neural network. Sompolinsky and Kanter [6] describe a neural network which is capable of recalling temporal patterns and suggest this may be usefui in understanding rhythmical patterns in biological motor systems. The visual tracking system is attractive because it appears to consist of a simple sensory input to motor output loop. To achieve good tracking behavior, the brain must serve as a controller which compensates for time delays and dynamics and is capable of adaptively responding to changes in time delay or dynamics. From this perspective, the brain is a dynamical, highly parallel, adaptive control system. This paper develops a dynamical neural network which helps to unify two apparently disparate models of smooth pursuit and clarify dynamical element organization. Realization issues are addressed, physiologic signal correlates suggested, and a framework offered to understand how adaptive changes might be implemented to compensate for eye muscle or neural dynamics changes. A . Experimental Methods
Experimental data and models developed in this report are taken from eye movement recordings in alert behaving monkeys. Human pursuit eye movement responses are similar, but slower. This paper concentrates on the pursuit response to ramp target motions where the visual target begins to move at a constant but unpredictable speed, at a random epoch, and in an unpredictable direction. Pursuit responses to predictable target motion probably involve a predictive neural network that is not considered here. The pursuit eye movements studied in this report were generated by visual target motion produced by an oscilloscope projector system [7]. Eye position was measured by the implanted induction eye coil technique [8]. Changes in plant dynamics were electronically simulated by modifying target position based on eye position signals. Data were collected by digitizing the eye and target position and velocity signals at 0.5 or 1 kHz sampling rates. Real-time experiment control and data acquisition
0018-9294/89/0100-0085$01.OO
0 1989 IEEE
86
I E E E T R A N S A C T I O N S O N B I O M E D I C A L E N G I N E E R I N G , VOL. 36, N O . I. J A N U A R Y 1989
respect to target velocity, the subsequent damped oscillation of eye velocity about true target speed, and the final close approximation of steady-state eye speed to target speed. All these features are similar to those previously reported in man [12], [13] and monkey [14], [7].
Time (msec) from Target Motion
Fig. I . A representative smooth pursuit system response. Velocity is in degree/second. A 2 O o / s step in target velocity is shown as the dashed lines. The eye velocity recording is the jagged curve and the blank space in this recording shows where a saccade was removed. The solid smooth curve shows the best nonlinear least-squares fit to the underlying data. Even within a set of trials in one animal there is Some variability in exact delay, damping, and oscillation frequency. Since point-by-point averaging in the face of this variability can obscure significant features we use analyses of individual trials to yield parameterizations from which a Drototvpe response is derived from the median or mean parameter set. . Our model simulations are based on similarly generated prototype responses.
.
I .
were accomplished by a set of laboratory computers (Apple 11, IBM-AT, and a PDP-11). Linear system manipulation was aided by Program CC [9] and nonlinear numerical simulation performed with Simnon [ IO].
B. Smooth Pursuit Major Attributes The visual tracking system provides eye movements which keep images of moving objects near the fovea where visual acuity is highest. The eyes move in response to target motion in a feedback-control system which seeks to reduce fixation error. Eye movements take several forms: smooth pursuit (sustained, low velocity motions which help match eye and target velocity), saccades (episodic, high velocity movements to reduce position error), and vergence (disconjugate movements which align images from near-field objects on the two retinas). The smooth pursuit system has proven to be a fruitful subject of study from both neurophysiology and engineering perspectives. When tracking is elicited by a sudden target motion, the usual response is to attempt to reduce this error by eye movements consisting of both smooth pursuit and saccadic components. Smooth pursuit eye movements without corrective saccades can be induced by superimposing a step in target position away from the fovea in the direction opposite to target motion (the Rashbass step-ramp paradigm [ I I]). If the step size is chosen so that the eye is just beginning to move as the target crosses the fovea, then the saccadic portion of the pursuit movement will be suppressed. Fig. 1 shows a typical response in one monkey to the step-ramp paradigm when the visual target velocity was 2Oo/s to the left. A major feature of the response is the delay from the onset of target motion to the apparent initiation of the response. This delay is typically 100 ms but can be as short as 80 ms or as long as 150 ms in some animals. Other features of the pursuit responses are the rapid initial eye acceleration immediately following the period of the delay, the overshoot of eye velocity with
11. THEORETICAL DEVELOPMENT A . Oculomotor Physiology to this system is the strutturd subtraction of target and eye position which occurs on the retina as shown in ~ i qa). ~ The . current dogma is that this visual error information is the primary input into the pursuit system [ 141 and that neither target nor eye position information are directly available to the system. From photoreceptors information then travels to visual cortex and then to temporal cortical regions believed specialized for motion analysis [ 151 where cells respond preferentially to certain target speeds and directions and are less influenced by retinotopic location. These temporal cortex cells respond to target motion with delays on the order of 80 ms. This velocity error information is believed to be a major drive behind the smooth pursuit system. Together with target position information and higher cortical inputs such as volition, the velocity information then passes to the pontine region of the brain stem and then to the cerebellum where it interacts with the signals helping to coordinate information that now specifies motor commands [ 141. The information is then reintegrated in the brain stem and sent to oculomotor nuclei where the information travels through the cranial nerves to the eye muscles which rotate the eye.
B. Development of a Mathematical Model From the conceptual information flow diagram of Fig. 2(a) we incorporate some linear systems dynamical notation in Fig. 2(b). Cortical motion processing, converting position information into velocity information, is represented by a differentiator ( s in Laplace notation). The loop delay has been lumped into a single element e-sT. The transition from sensory information into motor information is begun in the neural controller element labeled Gc. This scheme also includes the generally accepted notion that neural circuits which immediately precede oculomotor neurons provide both direct (velocity, 7 )and integrated (position, 1 / s ) signals to these neurons. The “neural integrator” is assumed to have a time constant much larger than 1-2 s and can thus be approximated by an ideal integrator 1 /s. From data collected in vergence studies [16] it appears that a step change in motor unit firing rate results in eye position changes well modeled as a two-pole plant with time constants of 0.2 and 0.015 s. Higher order lumped parameter models of the eye, muscles, and connective tissue [17] differ little in predicted responses. Nonlinearities in the plant due to saturation are unlikely in smooth pursuit where velocities are an order of magnitude less than during saccades. Fig. 2(c) shows the (parallel) premotor path effectively
DEN0
el
87
u l . : NEURAL NETWORK ORGANIZATION OF VISUAL PURSUIT SYSTEM
Fig. 2. Basic structure of the smooth pursuit system. (a) Information flow diagram. Retinal position information is the difference between target and eye position. Representation of this information is unspecified arid nonlinear dynamics are permitted. Abbreviations: cerebel. (cerebellum); integr (integrator); propor. (direct proportiona' pathway). (b) Mathematical model using Laplace notation. Delay has been lumped into a single element located where the majority of delay exists. The s denotes differentiation to obtain velocity information. The controller Gc is unspecified and possibly nonlinear. The plant GP is replaced with a linear systems model. Abbreviations: T(target position); E (eye position); RPE (retinal position error). (c) Equivalent model. Velocity can be considered to be the input and output of the smooth pursuit system. The premotor integral and direct paths create a zero which may cancel the plant's slow pole 7 ,since neural signals preceding this point seem to code for desired eye velocity. (d) Final reduced model. Models of the pursuit system share this basic arrangement but differ in realizations for Gc and G p . The controller has input node A (delayed retinal velocity error, RVE) and output node B (eye velocity command).
canceling the slow dynamics of the plant, as is commonly assumed [ 131. It also shows that the input and output signals can be considered to be target velocity T and eye velocity E , consistent with conventional descriptions of the smooth pursuit system. Finally, this simplified conceptual scheme can be formatted as shown in Fig. 2(d) in which velocity inputs and outputs are explicitly shown. Whether or not there is cancellation of the neural integrator by differentiation and cancellation of a plant pole by the premotor path, the resulting scheme may still be represented as in Fig. 2(d). All models and simulations of the system can start with this basic topology-they will differ only in the dynamics (possibly nonlinear) assigned to the controller Gc and the premotor circuit/plant Gp.
C. Previous Pursuit System Models Models of the pursuit system can be divided into three broad classes [Fig. 3(a)-(c)] based on the controller model Gc. Initial efforts to model smooth pursuit tracking described the system as a simple proportional error feedback servo that attempted to reduce the retinal slip velocity of the selected target image [18]. Fig. 3(a) illustrates a simple velocity-servo in which Gc becomes a scalar gain factor K . This model fails on two counts. First, there is a stability incompatibility in the requirement for both high gain and a significant delay [ 191. Second, the model fails
c- "G
,)
Fig. 3. Various controller models. (a) Simple proportional gain. (b) Robinson et al. [I31 (linearized). (c) Lisberger er al. [21] (linearized). (d) Alternative cancellation scheme. A rearrangement of cancellation schemes to emphasize three main components: G&! which embodies a (inverse) model of the plant, e-'TMwhich is a model of total loop delay, and GDa desired response element (e) Partial fraction re-representation of D above. The straight forward compensation in D above can be disguised as a parallel set of dynamical elements.
to account for observed periods of steady-state tracking where E 1 T[13]. The second class of models, illustrated in Fig. 3(b), may be called an efferent copy feedback model. A copy of the neural command for desired eye velocity (node B ) is passed through a central model of the plant dynamics and total loop delay e-"'GpM. The resulting output signal summed with the delayed retinal velocity error signal (node A ) recreates a central replica of target velocity TR. This is a valuable transformation and some oculomotor neurophysiology supporting a reconstructed TR has recently been described in the cerebellar vermis by Suzuki and Keller [20]. Taken together, Figs. 2(d) and 3(b) indicate that this arrangement creates an effectively openloop system in which reconstructed target velocity directly generates eye velocity through a central processor G;7. It is then clear that all the dynamic features observed in E (Fig. 1) for step inputs in target velocity must be generated by Gh. The recent model by Robinson et al. [13] uses this sort of efferent feedback. By judicious inclusion of nonlinear elements their model displays applicability over an extended range of target velocities. The third class of model is exemplified by Lisberger et
88
IEEE TRANSACTIONS ON BIOMEDICAL ENGINEERING. VOL. 36. NO. I , JANUARY 1989
al. [21] as shown in Fig. 3(c). It uses the retinal motion signal as the input to a parallel network which produces weighted combinations of retinal position, velocity, and acceleration errors (RPE, RVE, and RAE respectively). These signals are then combined and fed through a final ‘‘velocity memory” integrator to produce the eye velocity command. The necessity for the final integrator stems from open-loop pursuit experiments of Lisberger et al. [21]. If the visual feedback loop is electronically opened by fixing the target’s position on the retina, the animal’s eyes continue to move for a few seconds. Since retinal position and velocity error can be fixed at zero, some type of velocity holding circuit is needed and can be modeled as an integrator. This model is attractive because the coefficients of RPE, RVE, and RAE were directly estimated by experimentally imposing controlled position, velocity, or acceleration errors on the retinal input during openloop tracking. This model does not seem to extend as readily to a wide range of velocities as the efferent feedback type [ 131, but it too can produce many features of the monkey smooth pursuit response.
ical concepts. One question that arises from cancellation models such as Fig. 3(b) and (d) is how to create internal model delays on the order of 100 ms? It seems awkward to string together 100 1 ms synaptic delay elements and switch some in or out to adapt to different delays. Alternatively, one may approximate delays by systems which use a sort of mutual cancellation, e.g., Pad6 approximations. Time delays realized in this manner make the transition to our parallel neural network controller of Fig. 3(e) natural. A . Controller Example An example may help clarify our approach. A prototype smooth pursuit response (similar to Fig. 1) for tracking a 10-20” /s targets was well fit by a linear, time-invariant, deterministic, continuous system with transfer function
111. NEURALNETSA N D NEUROPHYSIOLOGY Models constructed from input-output responses are not unique. Realizations are often selected based on simplicity and consistency with both current data and physiolog-
+
+
+ 200’
A single-pole linear plant model 1 Gp(S) =
D. A Parallel Pursuit System Model We introduce a variation on the controller schemes described above which is shown in Fig. 3(d). For both conceptual simplicity and because signals which precede the neural integrator seem similar to eye velocity, we precede the plant GPwith an inverse plant model GiL. For a linear plant this implicitly requires GP be stable and minimum phase. At the input of this inverse plant is thus a central replica of eye velocity which, when passed through a model of the loop delay e-FTM, can cancel retinal feedback and thereby produce a central replica of the target’s velocity. The element labeled Go denotes the desired dynamics (possibly nonlinear) for the pursuit response. As a conceptual tool, and for correspondence with neural recording data discussed later, we develop a parallel feedforward dynamical neural network representation for this controller. Assuming Go is linear and choosing rational polynomial approximations for GD and e-’TM, a partial fraction expansion of Gc leads to a network of the form shown in Fig. 3(e). This basic manipulation shows, in the linear case at least, that the two classes of models (parallel feedforward and delayed efferent feedback) can be shown to be equivalent. This creates a bridge between the Lisberger and Robinson perspectives. Furthermore, issues of plasticity and adaptation are more easily addressed from the twin perspectives of Fig. 3(d) and (e). One can immediately predict what a corrective response to a change in system time delay, gain, or dynamics would entail (as done below). Finally, we are free to select Go to match an arbitrary input-output pair, contrary to the claim by Robinson et al. [ 131.
+
e-’.’”(5s 200) 0 . 0 0 3 ~ ~0 . 2 1 5 ~ ~6s
~-”G,(s) =
0.015s
+1
is assumed as motivated earlier and thus it is straight forward to determine Gc from Fig. 3(d). Replacinge-”M with a fifth-order Pade approximation leads to an 8th-order rational polynomial expression for Gc whose partial fraction expansion consists of five terms. Under the condition where delays T = T, = 0.1 s, a parallel controller representation [as in Fig. 3(e)] is G,(s) =
9.524
+
~
S
8.659s
+ 713.5 + 42.632
(s - 2.715f
+ 695.6 (s + 22.59f + 93.762 + 6.777s + 1402 - .00356 (s + 146.2f + 100.82 S + 39.57’ .0436s
+
Because the first two terms dominate, the controller could consist of two parallel dynamical pathways. If T and T, were increased to 0.18 s, and the controller adaptively responded to preserve the same step response (except for an additional 80 ms delay) the controller representation would be 5.405 G ~ ( s=) S
+
12.90s
+ 220.1
(s - 3.326f
+ 29.752
0.2078s + 734.2 + 4.563)2 + 58.772 12 + 6.483s + 1107 - 0S.000000 + 40.00 ( s + 97.93)2 + 79.102
+
(s
‘
Here, in addition to the first two terms, the third term plays a significant role. An adaptive change in Gc might consist of changing the handful of parameters involved in these three terms.
D E N 0 er ul : NEURAL NETWORK ORGANIZATION OF VISUAL PURSUIT SYSTEM
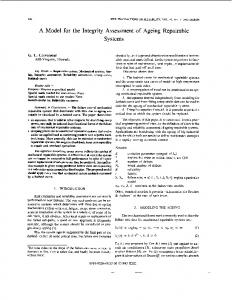
B. Neurophysiologic Correlates One possibility is that there are sets of brain cells whose discharge envelopes approximate each of the five hypothesized parallel signals in our expansion. There are, however, many equivalent schemes where cells carry linear combinations of this model's paths. For the case where T = 0.1 s and two parallel controller paths predominate we next illustrate that neural firing rate data can be consistent with the partial fraction expansion above. The top panel of Fig. 4 shows the location of the two significant outputs which together comprise the controller. In the middle and lower panels of Fig. 4, the outputs of the first and second terms are paired with neural discharge records actually recorded in the brainstem of a monkey shown such a target motion. These cellular responses are examples of a variety of dynamic neural signals recorded with microelectrodes in the pontine nuclei of monkeys (Keller and May, unpublished data). This region of the primate brain receives parallel inputs from a wide variety of extrastriate cortical regions thought to be involved in processing visual motion information. It has outputs to regions of the cerebellum involved with smooth eye movements [22]. Thus, hypothetical responses carried in these two paths may have some basis in neurophysiology. Without reference to the model, these neural responses could be difficult to fit into a functional relationship with the generation of pursuit. A direct interpretation of the neural response shown on the middle panel of Fig. 4 is as the integral of the retinal velocity slip signal. The function of the cell depicted in the lower panel may be to provide an early boost in eye velocity (at the cost of later oscillations in eye velocity about the true target velocity). Note that this neural signal is not in phase with either eye acceleration or retinal acceleration error, as reflected in the expression for G,( s). In fact, in a highly parallel system each neuron engaged in control could possess a different response pattern. This highlights one of the major differences of our parallel model from that of Lisberger et al. [21] where only retinal velocity error and its derivatives and integrals make up the parallel paths. IV. CALIBRATION A N D PLASTICITY The requirement for calibration to maintain accurate internal correlates of dynamic elements is often pointed out in discussions of the vestibulo-ocular reflex (VOR) (e.g., [24]). The plasticity of neural gains in the VOR has been clearly demonstrated by the telescopic spectacle and similar paradigms. Adjustments in synaptic efficacy are considered likely mechanisms for gain alterations required to keep the essentially open-loop VOR accurate. The utility of compensators that employ (explicitly or implicitly) models of the plant's delay and dynamics was discussed above. The models proposed did not include descriptions of how such internal models are kept in accurate form. Upon suddenly perturbing the system's delay or dynamics, the immediate resulting response should re-
89
m I
0 l5
I
1
Time (msec) from Target Motion Fig. 4. Parallel controller diagram and outputs. The plant was assumed to be linear single pole, the desired response assumed to be a linear secondorder system, and the model time delay replaced by a fifth-order Pad6 approximation. The resulting transfer function from A to E , after partial fraction expansion, consisted of only two dominant terms or elements. Top: the two parallel controller elements G,, and Gcz are shown within the pursuit system model. Middle: the G,, term was effectively an integrator and its output is shown by the smooth curve. It is matched with neural firing rate data from single-unit recording during such a pursuit trial. Both records are synchronized on onset of target motion. Lower: the other term GC2was a second-order system with an output shown by the smooth curve. Again, neural firing rate data from single-unit recording to show the existence of units with activity that can plausibly resemble the outputs of such simple parallel dynamical elements. All controller outputs are to the same scale.
flect sensitivity to an imperfect internal model, and the long term adaptation to such a change would reflect a recalibration of this internal model. It is not possible to actually modify the plant's dynamics or delay in normal human subjects or without invasive procedures on primates. The diagrams of Fig. 5 show an approach to provide the retina with information consistent with modified plant dynamics. To the extent that the retina constitutes the sole or major feedback pathway in pursuit, this external manipulation must completely simulate the desired change to the plant. Consider a modified plant whose dynamics are that of the original plant in series with a new element wch additional dynamics, gain, and time delay Gp = GpGAePSTA [Fig. 5(a)]. The old plant is a special case where GA(s) = 1 and TA = 0. Next, we move the GAe-sTAblock maintaining the same retinal signal and overall input-output relation. As shown in Fig. 5(b), this results in an element that uses current and past eye position to modify the actual target position T (perc%ived by the subject) from the "planned" target position T :
T =
f + ( 1 - GAe-"A)E.
IEEE TRANSACTIONS ON BIOMEDICAL ENGINEERING, VOL. 36, NO. I , JANUARY 1989
90
E
40
:
n
1
V e
1
r - - - - - - - -
-I
B GAe-"b
E
z
V
e 1
0 C
(b) Fig. 5. Target modification scheme to permit simulation of altered plant dynamics. (a) Motivational diagram. Consider the old plant G , to be in series with a new dynamical element GAe-'TAthereby forming the new plant Gp. (b) Equivalent diagram. Simulation of altered plant by electronic modification of target position utilizing an element with transfer function 1 - G,e-"7'. The term G , may incorporate dynamics (possibly nonlinear).
i
Y
E 60
:
V 40 e
1
0
F:
We have implemented digitally an element G,( s) = 1 GAePSTA that operates at rates of 1-2 kHz for both vertical and horizontal directions and allows selection of nearly any time delay, gain, and single-pole location. Some preliminary results for delay modification are presented in Fig. 6. The top panel shows a fairly oscillatory pursuit trial without saccades and under the control condition GA = 1 and TA = 0. The smooth curve is a least-squares fit of a second order linear system step response to this pursuit response. The oscillation period is about 300 ms. The middle panel of Fig. 6 is a representative eye velocity response a few trials after TAhas been increased to 80 ms. The peak eye velocity has increased to nearly 6Oo/s and the oscillation period is approximately 600 ms. After three days of three-hour training sessions with TA fixed at 80 ms, with randomized target speed and direction, a typical eye velocity record was selected and appears on the lower panel of Fig. 6. Evidence supporting an adaptive system is shown by a decreased oscillation period of about 400 ms. Our observations for the pursuit system's initial response to an acute increase in time delay are similar to those described recently by Goldreich and Lisberger [23]. They increased delay by reducing target intensity and by an electronic means similar to that described above. In their experiment, the oscillation period of the monkey pursuit response increased monotonically with added delay in the feedback loop. They claim that the parallel feedforward class of models can reproduce this effect but that the efferent feedback class cannot. We have run similar simulations on both classes of models and have confirmed their observation for simulations where the parameters are adjusted so that the eye shows a pronounced oscillation at the nominal delay. However, when the simulation is adjusted to produce a more damped response (which fits many animals that we have observed) both models make similar predictions. From the equivalence of the linear controllers shown in Fig. 3(d) and (e) it should be clear that experiments which
t.
Y -200
0
200
400
600
800
1000
1200
Time (msec) from Target Motion Fig. 6 . Illustration of time delay adaptation. Velocity is in degree/second. Top: fairly oscillatory smooth pursuit response under control conditions to a 20"/s target. The smooth curve is the result of a least-squares fit to the data from -200 ms to 1200 ms. Middle: same monkey as above with TAacutely set to 80 ms to simulate an extra 80 ms delay. The oscillation period has gone from nearly 300 ms above to about 600 ms. Lower: after three days of three-hour training sessions with TA at 80 ms a typical pursuit response now has an oscillation period of about 400 ms indicating partial adaptation to the additional time delay.
alter the visual feedback need not differentiate between these two classes of models. Adaptation to such a change in delay means that the neural delay correlate can be reconfigured. One possibility is the connection of additional neurons in series to prolong compensatory delay time T,. Alternatively, in the spirit of our Fig. 3(e) and the partial fraction expansion example earlier, several parallel-path synaptic strengths might be altered to effect a compensatory delay change in the controller. V . DISCUSSION A N D CONCLUSIONS Neural networks have appeared in conjunction with adaptive control as early as 1960 with the paper by Widrow and Hoff [25]. The ADELINE (ADAptive LInear NEuron) pursued a least mean square algorithm based on performance feedback to form the "best" linear switching circuit. Although this paper does not mention mechanisms governing adaptive control, the topic has been reviewed recently by Astrom [26]. Instead we focus on application of neural nets and dynamical systems theory to visual tracking system neurobiology. This paper has emphasized a role for internal models of plant dynamics and loop delay in compensation. We have illustrated that these models may be either explicit [lumped feedback, Fig. 3(d)] or implicit [parallel feedforward, Fig. 3(e)]. The lumped-feedback controller rep-
D E N 0 cl
01.:
N E U R A L NETWORK ORGANIZATION OF VISUAL PURSUIT SYSTEM
resentation used cancellation to explicitly recreate a central signal corresponding to target position or velocity. This strategy for the oculomotor system is attributed to Young et al. [27]. We use these two extremes to motivate descriptions of compensation schemes which help provide fast accurate tracking in the face of significant time delays. Linear system theory is not wholly adequate to analyze the smooth pursuit system. It is used, in part, because it is a familiar and tractible analytic tool for this extension into dynamical neural networks. Lisberger et al. [21] and Robinson er al. [ 131 have found nonlinear effects in monkeys at velocities as low as 5 ” / s . Our simulations and experimental data show that linear model parameters (calculated from our animal’s pursuit) provide adequate predictions of pursuit response if target velocities remain in the 20” /s and less range. Over a broader range of inputs, the smooth pursuit system behaves nonlinearly and there are many ways one can seek to model these effects. The Lisberger et al. model directly determines parameters which govern nonlinearity. However, their controller seems less rich than those of Robinson er al. or ours since the linearized controller is restricted to multiple poles at the origin. Our pursuit system model of Fig. 3(d) permits a direct correspondence between internal models and system behavior. Adaptive responses by the controller to changes in system dynamics [which follow directly from Fig. 3(d)] are readily reexpressed for the parallel realization of Fig. 3(e). Neural firing rate data was offered which was compatible with a parallel feedforward realization. Evidence supporting partial adaptation to increased time delay was given. In fact, since 100-300 ms delays from sensory input to motor response are so common one may expect delay compensation in biologic motor control to be omnipresent. These may be exciting grounds for interaction between mathematical possibility, engineering plausibility, and experimental neurophysiology.
REFERENCES
91
[9] Program CC-Computer-aided control system design package, Syst. Technol;, Inc. Hawthorne, CA 90250. [IO] K. J . Astrom, ”A Simnon tutorial. CODEN: LUTFDZ/(TFRT3168);’ Lund Inst. Technol., Lund, Sweden, 1982. [ 1 I] C. Rashbass, “The relationship between saccadic and smooth tracking eye movements,” J . Physiol., vol. 159, pp. 326-338, 1961. 1121 J . Pola and H. J . Wyatt, “Target position and velocity: The stimulus for smooth pursuit eye movements,” Vision Res., vol. 20, pp. 523534, 1979. 131 D. A. Robinson, J. L. Gordon, and S . E. Gordon, “A model of the smooth pursuit eye movement system,” B i d . Cybern., vol. 5 5 , pp. 43-57, 1986. 141 S . G. Lisberger and L. E. Westbrook, “Properties of visual inputs that initiate horizontal smooth pursuit eye movements in monkeys,” J . Neurosci., vol. 5 , pp. 1662-1673, 1985. 151 D. C. van Essen, J . H . R. Maunsell, and J . L. Bixby, “The middle temporal visual area in the macaque: Myeloarchitecture, connections, functional properties, and topographic organization,” J . Comp. Neurol., vol. 199, pp. 293-326, 1985. 161 E. L. Keller, “Accomodative vergence in the alert monkey,” Vision R e s . , vol. 13. pp. 1565-1575. 1973. 171 D . A. Robinson, “The mechanics of human saccadic eye movement,” J . Neurophys., vol. 174, pp. 245-264, 1964. 181 L. Young and L. Stark, “Variable feedback experiments testing a sampled data model for eye tracking movements,” IEEE Trans. Human Fucrors Electron. vol. HFE-4, pp. 28-51, 1963. 191 D. A. Robinson, “Models of oculomotor neural organization,” in The Control of Eye Movements. P. Bach-Y-Rita and C . C. Collins, Eds., New York: Academic, 1971, pp. 519-538. [20] D. A. Suzuki and E. L. Keller, “The role of the posterior vermis of monkey cerebellum in smooth pursuit eye movement control. 11. Target velocity-related Purkinjie cell activity,” J . Neurophysiol., vol. 59, pp. 19-40, 1988. [21] S . G. Lisberger, E. J . Morris, and L. Tychsen, “Visual motion processing and sensory-motor integration for smooth pursuit eye movements,” Ann. Rev. Neurosci., vol. 10, pp. 97-129, 1987. 1221 J . G . May, E. L. Keller, and D. A. Suzuki, “Smooth-pursuit eye movement deficits with chemical lesions in the dorsolateral pontine nucleus of the monkey,” J . Neurophysiol., vol. 59. pp. 952-977, 1988. [23] D. Goldreich and S . G. Lisberger, “Evidence that visual inputs drive oscillations in eye velocity during smooth pursuit eye movements in the monkey,” Soc. Neurosci. Absrr., vol. 13, p. 170, 1987. [24] F . A. Miles and S . G. Lisberger, “Plasticity in the vestibulo-ocular reflex: A new hypothesis,” Ann. Rev. Neurosci., vol. 4, pp. 273299. 1981. [25] B . Widrow and M. E. Hoff, “Adaptive switching circuits,” presented at IRE WESCON Convention Record, pp. 96- 104, 1960. [26] K. J . Astrom, “Adaptive feedback control,” Proc. IEEE, vol. 75, pp. 185-217, 1987. [27] L. Young, J . Forster, and N. Van Houtte, “A revised stochastic sample data model for eye tracking movements,” presented at Fourth Ann. NASA-Univ. Conf. Manual Contr., Univ. Mich., Ann Arbor, MI, pp. 489-508, 1968.
[ I ] T. Kohonen and E. Oja, “Fast adaptive formation of orthogonalizing
filters and associative memory in recurrent networks of neuron-like elements,” Biol. Cybern., vol. 21, pp. 85-95, 1976. [2] J . A. Anderson, “Cognitive and psychological computation with neural models,” IEEE Trans. Syst., Man, Cybern., vol. SMC-13, pp. 799-815, 1983. [3] J. J . Hopfield and D. W . Tank, “Computing with neural circuits: A model,” Science, vol. 233, pp. 625-633, 1986. [4] S . C. Cannon and D. A. Robinson, “An improved neural-network model for the oculomotor system: More realistic neuron behavior,” Biol. Cybern., vol. 53, pp. 1-16, 1985. [ 5 ] A. G . Barto, R. S . Sutton, and C. W . Anderson, “Neuronlike adaptive elements that can solve difficult learning control problems,” IEEE Trans. Syst., Man, Cybern., vol. SMC-13, pp. 834-846, 1983. [6] H. Sompolinski and I . Kanter, “Temporal association in assymetric neural networks,” Phys. Rev. Lerr., vol. 57, pp. 2861-2864, 1986. [7] E. L. Keller and N. S . Khan, “Smooth-pursuit initiation in the presence of a textured background in monkey,” Vision Res., vol. 26, pp. 943-955, 1986. [8] A. Fuchs and D. Robinson, “A method for measuring horizontal and vertical eye movements chronically in the monkey,” J . Appl. Physid,, vol. 21, pp. 1068-1070, 1966.
D. Curtis Deno (M’78) was born in Schenectady, NY, in 1954. In 1976 he received the B S degree in electrical engineering and biomedical engineering and the M.S. degree i n biomedical engineering from Rensselaer Polytechnic Institute, Troy, NY. He received the M.D. degree from Hahnemann University, Philadelphia, PA in 1980. He completed a one-year internship with the Department of Medicine, Albany Medical College, Albany, NY in 1981 and subsequently did three years as an NIH postdoctoral fellow in physiology, including one year of clinical trauma research, at Albany Medical College Since 1984 he has been working on the Ph D degree in electrical engineering from the University of California, Berkeley, CA, where he has advanced to candidacy. His major interests include. control systems, machine and biological vision, neural networks, dynamical systems theory, real-time control, neurobiology, physiology, and medicine. Dr. Den0 is a member of Sigma Xi and Alpha Omega Alpha.
1' 2
*