Generalized Equations for Estimating Stress Concentration Factors of Various Notch Flexure Hinges Guimin Chen∗, Jialu Wang and Xiaoyuan Liu
School of Electro-Mechanical Engineering, Xidian University, Xi’an, Shaanxi 710071, China Abstract The flexure hinges are the most vulnerable parts in a flexure-based mechanism due to their smaller dimensions and stress concentration characteristics, therefore evaluating the maximum stresses generated in them is crucial for assessing the workspace and the fatigue life of the mechanism. Stress concentration factors characterize the stress concentrations in flexure hinges, providing an analytical and efficient way to evaluate the maximum stress. In this work, by using the ratio of the radius of curvature of the stressconcentrating feature to the minimum thickness as the only fitting variable, generalized equations for both the bending and tension stress concentration factors were obtained for two generalized models, the conic model and the elliptic-arc-fillet model, through fitting the finite element results. The equations are applicable to commonly used flexure hinges including circular, elliptic, parabolic, hyperbolic, and various corner-fillet flexure hinges, with acceptable errors. The empirical equations are tractable and easy to be employed in the design and optimization of flexure-based mechanisms. The case studies of the bridgetype displacement amplifiers demonstrated the effectiveness of the generalized equations for predicting the maximum stresses in flexure-based mechanisms.
1
Introduction
Compliant mechanisms that utilize notch flexure hinges as their kinematic pairs (flexure-based mechanisms for short) have been widely used in applications where high precision is required within relatively small workspaces, e.g., scientific instruments and molecular experiments. The performance of a flexure-based mechanism are often evaluated with respect to four most important criteria: (1) the ratio of off-axis stiffness to axial stiffness [1], (2) the accuracy of motion (or parasitic motion) [2], (3) the range of motion [3], and (4) fatigue life [4]. These performance criteria vary greatly depending on the flexure hinges employed, making 1 Corresponding
to: Guimin Chen (
[email protected])
1
the design of the flexure hinges of practical importance. Notch flexure hinges of various cutout profiles have been developed and extensively researched [7–14]. The closed-form compliance and precision equations for most of them are available, which are adequate for evaluating the aforementioned criteria 1 and 2 for a given flexure-based mechanism. Due to their smaller dimensions and stress concentration characteristics, flexure hinges are always the most vulnerable parts in flexure based mechanisms; therefore, calculating the maximum stresses generated in them is crucial for evaluating criteria 3 and 4 (i.e., workspace and fatigue life). The usual procedure for calculating the maximum stresses at stress raisers is multiplying the nominal stresses obtained from the elementary stress equations of mechanics by the pertinent stress concentration factors [15]. However, little effort has yet been devoted to develop equations for the stress concentration factors of flexure hinges (as will be reviewed in Section 2), instead evaluation of maximum stresses in flexure-based mechanisms heavily relies on finite element analysis (FEA). Therefore, the objective of this research is to develop empirical equations for the stress concentration factors of commonly used flexure hinges. In our previous work [16, 17], two generalized models (i.e., the conic model and the elliptical-arc-fillet model) for various flexure hinges were proposed, which simplify flexure hinge design by combining the cutout profile selection and parameter design into one process. These two flexure models, as illustrated in Figure 1, cover most of the commonly used flexure hinges, both in the coverage of flexure types and in their performances. Closed-form compliance and precision equations were derived for these two flexure models. Supplementing these generalized models, this work proposes generalized equations for evaluation of the stress concentration factors of the two flexure models through curve fitting techniques. Generally speaking, the fitting data for stress concentration factors can be obtained through experimentation (e.g., photoelasticity), analytical methods (e.g., the theory of elasticity) or numerical methods (e.g., FEA and the body force method [19]). In this work, we employ FEA to collect the fitting data because it is an effective and inexpensive method for assessing stress concentration factors. The rest of this paper is organized as follows. Section 2 provides the basic difinitions of stress concentration factors for flexure hinges, which is followed by a brief literature review. The two subsections in Section 3 present the geometric parameter relationships, describe the FEA modeling, and obtain the corresponding empirical equations for the stress concentration factors for conic flexures [16] and ellipticalarc-fillet flexures [17], respectively. Section 4 demonstrates the use of these empirical equations by applying them to two bridge-type displacement amplifiers. Finally, Section 5 includes concluding remarks.
2
Figure 1: Schematics of a conic flexure hinge and an elliptical-arc-fillet flexure hinge (with the positive directions for the loads shown according to the sign convention in Ref. [18]). For the conic flexure hinge, the cutout depth d is equivalent to parameter c in Ref. [16].
2 Stress Concentration Factors: Definition and Review 2.1 Definition The area reduction in the notch region of a flexure hinge induces a localized increase in stress, causing the actual maximum stress to be significantly greater than that predicted by elementary mechanics of materials equations. This stress increase can be quantitatively characterized by the stress concentration factor, which is defined as the ratio of the maximum stress to the nominal stress (also referred to as the reference stress); thus, during the design of a flexure-based mechanism, the stress concentration factor is useful to estimate the actual maximum stress from the nominal stress in a flexure hinge. This stress concentration factor depends solely on the geometry of the notch region and the type of loading. As shown in Figure 1, we assume flexure hinges to be subject only to in-plane loads (i.e. a tensile force Fx , a pure moment Mz , and a transverse force F y , with negligible shearing effect due to F y ). This is to say, only the tensile stress and the bending stress are considered (because F y causes a similar bending effect to Mz ). When subject to a pure moment Mz , the actual maximum bending stress occurs at outermost fibers of the minimum cross-section and can be calculated as [26] σbmax = kb σbnom
(1)
where kb denotes the stress concentration factor for bending, and σbnom is the nominal maximum bending stress given as σbnom =
3
6Mz wt2
(2)
If only a tensile force Fx is applied, the actual maximum stress in the flexure hinge is estimated by [26] σtmax = kt σtnom
(3)
in which kt denotes the stress concentration factor for tension, and σtnom is the nominal tensile stress determined by taking the minimum cross-section: σtnom =
Fx wt
(4)
When combined loads are applied, the nominal stress due to each load is individually multiplied by its corresponding stress concentration factor, and the resultant stresses are found by superposition.
2.2
Review
Stress concentration factors for various geometric features and different loading conditions have been categorized in two authoritative resources, i.e., Pilkey et al. [6] and Young et al. [26]; however, they can be difficult to directly apply to the design of flexure hinges because they cover commonly encountered geometries in mechanical parts and few of the geometries match the dimensions of flexure hinges. By approximating one of the charts in Ref. [6], Smith et al. [23] obtained an expression for the bending stress concentration factor of right-circular flexure hinges given as kb =
t 2.7t + 5.4R + 0.325, 0 < < 2.3 8R + t 2R
(5)
in which R and t are the radius of the circular cutouts and the minimum thickness, respectively. Yang et al. [24] provided an empirical equation for predicting the maximum bending stresses in circular flexure hinges: σmax =
4Et1/2 y · 3πR1/2 I
(6)
where w is the flexure width, E is the Young’s modulus of the material, I = wt3 /12 and y = t/2. Similarly, Smith et al. [8] presented an equation for the bending stress concentration factor of circular flexure hinges based on the full solution obtained by Ling [20], which is given as ( ) t 9/20 t kb = 1 + < 2.3 , 0< 2R 2R
4
(7)
Pilkey et al. [6] presented an equation for evaluating the tensile stress concentration factor of a plane element with two opposing deep hyperbola notches based on Durelli’s work [27], which is useful for hyperbola flexure hinges and can be written as )√ t t +1 2ρ 2ρ kt = ( √ ) t t t + 1 arctan + 2ρ 2ρ 2ρ (
2
(8)
where ρ is the radius of curvature of the cutouts at the notch bottom. Dirksen et al. [4] provided the following equations for estimating the stress concentration factors of circular and parabolic flexure hinges: ( ) ( )2 ( )−3 ( )( )−1 ( )−1.25 −1/2 ρ t t t t c c + 0.7 1 + + 0.13 + kt = 1 + 0.1 c 2ρ 2ρ 2ρ 2ρ ρ ρ ( )2.25 ( )−3.375 ( )( )−1 ( )−1.33 −1/2 ( ρ )0.66 t t t t c t kb = 1 + 0.08 + 2.2 1 + + 0.2 + c 2ρ 2ρ 2ρ 2ρ ρ ρ
(9)
(10)
where d is the depth of the cutouts (for circular flexure hinges ρ = R). The empirical expressions for both kt and kb obtained by Hale [28] are useful for circular-fillet flexure hinges with the ratio of fillet radius to minimum thickness (R/t) ranging from 0.5 to 2: ( )3 ( )2 ( ) R R R + 1.9613 + 0.8539 − 1.4265 t t t
(11)
( )4 ( )3 ( )2 ( ) R R R R + 1.669 − 0.9288 + 1.8387 − 1.6593 t t t t
(12)
kt = −0.1729
kb = 0.1721
Because these equations apply to specific types of flexure hinges, it is burdensome to work with all of them for flexure type selection. Moreover, some of them are quite complicated and inconvenient to use for design work. By building off of the generalized models for flexure hinges [16, 17], we will present generalized expressions for the stress concentration factors of the most commonly-used flexure hinges in the following section. Finally, we note that Ashby et al. [25] proposed a general stress concentration factor equation for flat bars with center holes, opposite shoulder fillets or opposite notches, which can be rewritten for flexure hinges as:
( kt,b = 1 + α
t 2ρc
)1/2 (13)
where ρc is the radius of curvature of the stress-concentrating feature at the notch bottom, and the factor α is 2 for tension but 1/2 for bending. This equation is useful for roughly estimating the stress concentrations 5
in various flexure hinges, but might yield rather large errors. What interests us most of this equation is that its only parameter t/ρc is nondimensional and precisely characterizes the local geometric change in the stress raiser.
3 Generalized Equations for Stress Concentration Factors Equation (13) indicates that stress concentration factors for flexure hinges strongly depend on the minimum thickness t and the corresponding radius of curvature ρc . Charts for plane elements containing two opposing notches [6] show that H has a noticeable effect on the stress concentration factor for smaller H/t (usually H/t < 2); however, this effect is negligible for flexure hinges because H/t is always greater than 2. Therefore, by defining ζ = ρc /t as the non-dimensional stress-concentrating parameter, generalized empirical equations for predicting the stress concentration factors for conic and elliptic-arc-fillet flexure hinges can be formulated based on the finite element results in the following two subsections. It should be noted that the finite element results were obtained for a wide range of flexure hinge designs, thus allowing wide applicability of the resulting empirical equations. All the flexures are assumed to be made of steel with Young’s modulus E = 2.07 × 1011 and Poisson’s ratio ν = 0.28.
3.1
Conic Flexure Model
Figure 2: A conic cutout and its polar coordinates.
6
3.1.1
Basic geometric relationships and radius of curvature
The conic family of flexure hinges encompasses three types of flexure hinges, i.e., hyperbola, parabola and elliptic (including circular) flexure hinges. Figure 1 shows a conic flexure hinge whose major geometric parameters include the minumum thickness t, the cutout length L = 2a, the cutout depth c and the crosssection width w. By using a polar coordinate system, see Figure 2, we can represent different conic cutouts in a generalized form as [16] r(θ) =
ep 1 + e cos θ
(14)
where p (p > 0) is the distance between focus “F” (the focus is located at the pole of the polar coordinate system) and the corresponding directrix, and e is the eccentricity, determined by e=
r(θ) m(θ)
(15)
If e > 1, the cutout is a hyperbola, if e = 1, it is a parabola, if 0 < e < 1, it is an ellipse, and if e = 0, it is a circle (p → ∞ and ep = R). The radius of curvature at an arbitrary polar angle θ of the cutout can be calculated as ρ=
ep(e2 + 2e cos θ + 1)3/2 [r2 (θ) + r′2 (θ)]3/2 = |r2 (θ) + 2r′2 (θ) − r(θ)r′′ (θ)| |(1 + e cos θ)3 |
(16)
where primes refer to derivatives with respect to parameter θ. We are only interested in the notch bottom where the maximum stress occurs. At the notch bottom, θ = 0 and the corresponding radius of curvature can be obtained from Eq. (16) as ρc = ep
(17)
The parameters e and p can be calculated as follows: e=
√ √
1 − R2a /R2b ,
for elliptic cutouts
1 + R2a /R2b ,
for hyperbolic cutouts (18)
1,
for parabolic cutouts
0,
for circular cutouts
7
Figure 3: Finite element model of a conic flexure design.
and
p=
√ √
R2a R2b
−
,
for elliptic cutouts
,
for hyperbolic cutouts
R2a
R2a R2b + R2a
a2 , 2c
for parabolic cutouts
∞,
for circular cutouts
(19)
where, for elliptic and hyperbolic flexures, Rb (along the polar axis) and Ra are the semimajor axis and the semiminor axis, respectively. We also have the following relationships for the cutout parameters: a2 + c2 ce − p= 2ce 2 √ a2 p2 e2 + p4 e2 − a2 p2 − a2 θm = arccos e(a2 + p2 ) L = 2a = c=−
2ep sin θm 1 + e cos θm
ep cos θm ep + 1 + e cos θm 1 + e
(20)
(21)
(22) (23)
where θm is termed as the maximum polar angle of the conic cutouts. 3.1.2
Finite Element Modeling
Two hundred seventy-seven conic flexure designs were simulated in order to provide abundant FEA results for curve fitting. The scopes of the geometric parameters of the designs are: 0.2 mm≤ t ≤ 3 mm, 1 mm≤ a ≤ 10 mm, 2.2 mm≤ c ≤ 23 mm, and 0 ≤ e ≤ 1.8 mm. The FEA model of each design was meshed 8
with SOLID92 elements in ANSYS, which is a ten-node tetrahedral element with three degrees of freedom at each node and is much more accurate than the SOLID72 element. To ensure validity of the FEA results, the mesh of each model was refined in the notch region so that no less than six elements were generated across the thinnest part. A typical meshed model is displayed in Figure 3. Each model was fixed on the left end, and loaded with a unit load (i.e., Mz for bending while Fx for tension) on the right end. After completion of each solution, the corresponding maximum stress (σmax ) was recorded, which was then used to calculate kb (or kt ) using Eq. (1) (or Eq. (3)). These results leave no doubt that the maximum stress of every flexure model occurs at the outermost edges of the thinnest cross section.
3.1.3
Results
1.5 ρc
1.45 1.4
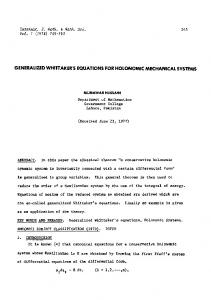
t=0.2mm,e=0.6 t=0.2mm,e=1 t=0.2mm,e=1.5 t=2mm,e=0.6 t=2mm,e=1 t=2mm,e=1.5 Fitting Equation
t
1.35
Kt
1.3 1.25
ρc
ρc
1.2 1.15
t t
1.1 1.05 1 0
5
10
15
20
25 ζ
30
35
40
45
50
Figure 4: Tension stress concentration factor for conic flexure hinges.
The FEA results for both kb and kt confirm the previous observations that the stress concentration factors are dominated by the non-dimensional parameter ζ = ρc /t while the other geometric parameters (e.g., H and L) have negligible effects on the stress concentration factors. Therefore, a rational function of ζ with 1st degree polynomials in both the numerator and denominator could fit the FEA results for kb and kt , thereby obtaining the following empirical equations: kt =
ζ + 0.335 ζ + 0.035 9
(24)
1.35
t=0.2mm,e=0.6 t=0.2mm,e=1 t=0.2mm,e=1.5 t=2mm,e=0.6 t=2mm,e=1 t=2mm,e=1.5 Fitting Equation
1.3 1.25
Kb
1.2 1.15 1.1 1.05 1 0
5
10
15
20
25 ζ
30
35
40
45
50
Figure 5: Bending stress concentration factor for conic flexure hinges.
and kb =
ζ + 0.188 ζ + 0.014
(25)
The maximum errors of these empirical equations for kt and kb , when compared to the FEA results, are 1.3% and 1.9%, respectively. Figure 4 plots the empirical equation of kt as a function of ζ and six selected sets of the FEA results for the purpose of comparision. The insets in Figure 4 show the profile sketches of three flexure designs with different ζ, in which ζ = 0.6 corresponds to a rather thick flexure design, while ζ = 50 to a quite thin and long flexure design. Thus, Eq. (24) is applicable to a wide range of conic flexure hinges. Figure 5 compares the empirical equation for kb with six selected sets of the FEA results, from which we can tell that Eq. (25) is accurate for a wide range of conic flexure hinges.
3.2 3.2.1
Elliptical-Arc-Fillet Flexure Model Basic geometric relationships and radius of curvature
An elliptical-arc-fillet flexure is a corner-filleted hinge with fillets of elliptical-arc instead of quarter-circle, as shown in Figure 1(b). We use Ra to denote the semi-axis along the x-axis of the elliptical-arc fillets and Rb for the semi-axis along the y-axis (the larger of Ra and Rb is the semimajor axis). The major geometric parameters include the cutout length L, the length of the straight portion l, the minumum thickness t, the
10
Figure 6: An ellipse and the eccentric angle ϕ.
cross-section width w, the cutout depth d. This gives d = Rb (1 − cos ϕm )
(26)
L = l + 2c = l + 2Ra sin ϕm
(27)
where ϕm is the maximum eccentric angle of the elliptical-arc fillets. Elliptical arc flexures (l = 0) [11], circular-arc-fillet flexures (Ra = Rb ), and elliptical-fillet flexures (ϕm = π/2), elliptical flexures (ϕm = π/2 and l = 0), circular-fillet flexures (Ra = Rb and ϕm = π/2) [9], circular flexures (Ra = Rb and l = 0) [7] and right-circular flexures (Ra = Rb , ϕm = π/2 and l = 0) can be treated as subclasses of elliptical-arc-fillet flexures. The ellipse can be parameterized using the eccentric angle ϕ as x(ϕ) = −Ra sin ϕ, y(ϕ) = Rb cos ϕ
(28)
According to the equation of radius of curvature (found using calculus), for a parameterized curve the radius of curvature at each point of the curve is (R2a cos2 ϕ + R2b sin2 ϕ)3/2 [x′2 (ϕ) + y′2 (ϕ)]3/2 ρ= ′ = |x (ϕ)y′′ (ϕ) − x′′ (ϕ)y′ (ϕ)| Ra Rb
(29)
where primes refer to derivatives with respect to ϕ. The thinnest cross section suddenly changes at the connections of the straight portion and the fillets, where the maximum stress may occur and the 11
Figure 7: Finite element model of a elliptic-arc-fillet flexure design.
corresponding radius of curvature can be calculated using Eq. (29) as (ϕ = 0) ρc =
3.2.2
R2a Rb
(30)
Finite Element Modeling
Similarly to the method of Section 3.1.2, 218 elliptic-arc-fillet flexure designs were employed to collect FEA results. The scopes of the geometric parameters of the designs are: 1.8 mm≤ L ≤ 37.3 mm, 0.1 mm≤ l ≤ 20 mm, 0.2 mm≤ t ≤ 3 mm, 1 mm≤ Ra ≤ 10 mm, 1 mm≤ Rb ≤ 10 mm, and 0.8 mm≤ c ≤ 9 mm. Again, the SOLID92 element was used to model the flexure designs. Figure 7 shows one of the meshed models. The FEA results for kb and kt were calculated using Eq. (1) and Eq. (3), respectively, based on the maximum stresses of FEA. The maximum stress of every FEA model occured at the outermost edges of the cross sections where the straight portion and the fillet-curve portion are tangent.
3.2.3
Results
As was the case for the conic flexure hinge model, the FEA results for both kb and kt confirm that the stress concentration factors of elliptic-arc-fillet flexures are dominated by the non-dimensional parameter ζ = ρc /t while the other geometric parameters (e.g., H, L and l) have negligible effects on the stress concentration factors. The following empirical equations for kb and kt were obtained by fitting the FEA results: kb =
ζ + 0.253 ζ + 0.097
(31)
kt =
ζ + 0.371 ζ + 0.097
(32)
and
12
1.45 t=0.2mm, l=0.1mm t=0.2mm, l=1mm t=0.2mm, l=5mm t=2mm, l=0.1mm t=2mm, l=1mm t=2mm, l=5mm Fitting Equation
ρc
1.4 t
1.35
ρc
1.3 Kt
1.25 ρc
1.2 t
1.15
t
1.1 1.05 1 0
5
10
15
20
25 ζ
30
35
40
45
50
Figure 8: Tension stress concentration factor for elliptic-arc-fillet flexure hinges.
1.25 t=0.2mm, l=0.1mm t=0.2mm, l=1mm t=0.2mm, l=5mm t=2mm, l=0.1mm t=2mm, l=1mm t=2mm, l=5mm Fitting Equation
1.2
Kb
1.15
1.1
1.05
1 0
5
10
15
20
25 ζ
30
35
40
Figure 9: Bending stress concentration factor for elliptic-arc-fillet flexure hinges.
13
45
50
Figure 10: A bridge-type displacement amplifier.
Table 1: The geometric parameters of the displacement amplifier using conic flexure hinges. Lr w βr β1 = β2 e t a c 30 mm 10 mm 8◦ 4◦ 1.1 0.5 mm 4 mm 5 mm Figures 8 and 9 plot the empirical equations of kt and kb as functions of ζ, accompanied by six selected sets of the FEA results for comparision. Compared to the FEA results, the maximum errors of the empirical equations for kt and kb are 2.7% and 1.7%, respectively. The insets in Figure 8 indicate that the two empirical equations are applicable to a wide range of elliptic-arc-fillet flexure hinges.
4 Case Study In this section we use the empirical equations to evaluate the maximum stresses in the two bridge-type displacement amplifiers illustrated in Figure 10. Each amplifier is made of steel with Young’s modulus E = 2.07 × 1011 and Poisson’s ratio ν = 0.28, and its eight flexure hinges are identical. The amplifiers are driven by PZT actuators whose maximum input displacement ∆x = 0.04 mm. Considering that the geometry and loading are symmetric with respect to the horizontal and vertical centerlines, we need to model only a quarter of each of the amplifiers (the top-left quadrant is picked). Evaluating the maximum stresses of the amplifiers requires accurate predictions of the in-plane loads acting on each flexure, which were obtained using an analytical model for the amplifier based on the generalized models [16, 17]. The details of the analytical model are not going to be discussed in the current paper. The first displacement amplifier employs hyperbolic flexure hinges with parameters listed in Table 1.
14
DMX =.774E-03 SMN =4188 SMX =.120E+10 SMXB=.123E+10 MN
MX
Figure 11: Contour plot of the stress distribution in the displacement amplifier using conic flexure hinges predicted by ANSYS.
Table 2: The geometric parameters of the displacement amplifier using conic flexure hinges. Lr w βr β1 = β2 L l t Ra Rb ϕm 70 mm 10 mm 9◦ 6◦ 10.7 mm 4 mm 1 mm 3.87 mm 4 mm 60◦ According to Eq. (20), the nondimensional parameter ζ is determined as a2 + c2 ce ζ = ρc /t = e − /t = 2.15 2ce 2
(33)
When the input displacement ∆x reaches 0.04 mm, the in-plane loads exerted on the two flexure hinges are: Fx1 = 74.2231 N, F y1 = −5.1902 N, Mz1 = −0.15413 N·m, Fx2 = 74.2231 N, F y2 = −5.1902 N, Mz2 = 0.19804 N·m. Thus the maximum stress of Hinge 1 occurs at the upper surface of the thinnest cross section and can be calculated as σmax
Fx1 6Mz1 + 6aF y1 ζ + 0.335 Fx1 ζ + 0.188 = kt + kb = ζ + 0.035 · wt + ζ + 0.014 wt wt2
6Mz1 + 6aF y1 8 · = 4.7032 × 10 Pa wt2
(34)
while the maximum stress of Hinge 2 occurs at the lower surface of the thinnest cross section and can be determined as σmax = kt
Fx2 6Mz2 + 6aF y2 8 + kb = 4.766 × 10 Pa wt wt2
(35)
Figure 11 shows ANSYS results of the stress distribution in the amplifier and the corresponding maximum stresses of Hinge 1 and Hinge 2 are 4.7136 × 108 Pa and 4.7868 × 108 Pa, respectively. The maximum stresses predicted by the empirical equations agree well with the FEA results. The second displacement amplifier employs elliptic-arc-fillet flexure hinges whose parameters are listed
15
MX
MN
Figure 12: Contour plot of the stress distribution in the displacement amplifier using elliptic-arc-fillet flexure hinges predicted by ANSYS.
in Table 2. According to Eq. (30), the nondimensional parameter ζ is determined as ζ = ρc /t =
R2a = 3.7442 tRb
(36)
When the input displacement ∆x reaches 0.04 mm, the in-plane loads exerted on the two flexure hinges are: Fx1 = 14.4798 N, F y1 = −1.5219 N, Mz1 = −0.19892 N·m, Fx2 = 14.4798 N, F y2 = −1.5219 N, Mz2 = 0.24037 N·m. Therefore, the maximum stress of Hinge 1 occurs at the upper surface of the leftmost cross section of the straight portion and can be calculated as σmax
6Mz1 + 6(l + c)F y1 ζ + 0.371 Fx1 ζ + 0.253 6Mz1 + 6(l + c)F y1 Fx1 7 = kt + kb · + · = = 5.822 × 10 Pa (37) wt ζ + 0.097 wt ζ + 0.097 wt2 wt2
while the maximum stress of Hinge 2 occurs at the lower surface of the rightmost cross section of the straight portion and can be determined as σmax
Fx2 6Mz2 + 6cF y2 7 + kb = kt = 5.8396 × 10 Pa wt wt2
(38)
Figure 12 shows the ANSYS results of the stress distribution in the amplifier and the corresponding maximum stresses of Hinge 1 and Hinge 2 are 5.8092 × 107 Pa and 5.8332 × 107 Pa, respectively. Again, the maximum stresses predicted by the empirical equations agree well with the FEA results.
5
Conclusions
In this work, the generalized equations for both the bending and tension stress concentration factors were obtained for the two generalized models by fitting FEA results. These equations are applicable to commonly used flexure hinges including circular, elliptic, parabolic, hyperbolic, and various corner-fillet flexure hinges, 16
with acceptable errors. They are tractable and easy to be employed in the design and optimization of flexurebased mechanisms. Two case studies of bridge-type displacement amplifiers demonstrate the effectiveness of these empirical equations for predicting the maximum stresses in flexure-based mechanisms. The generalized stress equations for flexure hinges presented in this paper, together with the generalized compliance and precision equations derived in our previous work [16, 17], form a comprehensive tool for modeling/optimizing flexure-based mechanisms which we call the GEneralized Modeling Approach (GEMA). Future work will demonstrate the use of GEMA for designing flexure-based mechanisms.
6
Acknowledgment
The authors gratefully acknowledge the financial support from the Aviation Science Fund of China under Grant No. 20100881012, the National Natural Science Foundation of China under Grant No. 51175396, the program for new century excellent talents in university under Grant No. NCET-11-0689, and the Fundamental Research Funds for the Central Universities under No. K5051204021.
References [1] Trease, B. P., Moon, Y.-M., and Kota, S., 2005, Design of large-displacement compliant joints, Trans. ASME, J. Mech. Des., 127(7), 788-798. [2] Xu, W. and King, T., 1996, Flexure hinges for piezoactuator displacement amplifiers: flexibility, accuracy, and stress considerations. Precis Eng., 19: 4-10. [3] Shi, H. and Su, H., 2013, Workspace of a Flexure Hexapod Nanopositioner, Trans. ASME, J. Mech. Robot., to be published. [4] Dirksen, F., Anselmann, M., Zohdi, T. I., Lammering, R., 2013, Incorporation of flexural hinge fatiguelife cycle criteria into the topological design of compliant small-scale devices, Precis. Eng., 37(3): 531-541. [5] Vallance, R. R., Haghighian, B., and Marsh, E. R., 2008, A unified geometric model for designing elastic pivots. Precis Eng., 32: 278-288. [6] Pilkey, W. D. and Pilkey, D. F., 2008, Peterson’s Stress Concentration Factors (3rd ed), John Wiley & Sons, New York. [7] Paros, J. M., and Weisbord, L., 1965, How to design flexure hinges. Mach. Des., 37: 151-156. 17
[8] Smith, S. T., Badami, V. G., Dale, J. S., and Xu, Y., 1997, Elliptical flexure hinges. Rev. Sci. Instrum., 68(3), 1474-1483. [9] Lobontiu, N., Paine, J. S. N., Garcia, E., and Goldfarb, M., 2001, Corner-filleted flexure hinges. ASME Trans., Journal of Mechanical Design, 123(9): 346-352. [10] Lobontiu, N., Paine, J. S. N., O’Malley, E., Samuelson, M., 2002, Parabolic and hyperbolic flexure hinges: flexibility, motion precision and stress haracterization based on compliance closed-form equations. Precis Eng., 26(2):183-192. [11] Chen, G., Shao, X., and Huang, X., 2008, A new generalized model for elliptical arc flexure hinges. Rev. Sci. Instrum., 79(9): 095103. [12] Tian, Y., Shirinzadeh, B., and Zhang, D., 2010, Closed-form compliance equations of filleted V-shaped flexure hinges for compliant mechanism design. Precis Eng., 34(3): 408-418. [13] Li, Q., Pan, C., and Xu X., 2013, Closed-form compliance equations for power-function-shaped flexure hinge based on unit-load method, Precis Eng., 37(1): 135-145. [14] Lobontiu, N., Cullin, M., Petersen, T., Alcazar, J. A., and Noveanu, S., 2013, Planar Compliances of Symmetric Notch Flexure Hinges: The Right Circularly Corner-Filleted Parabolic Design, IEEE Trans. Autom. Sci. Eng.: to be published. [15] Shea, R., 1964, Dynamic Stress-concentration Factors, Experimental Mechanics, 4(1): 20-24. [16] Chen, G., Liu, X., Gao, H., and Jia, J., 2009, A generalized model for conic flexure hinges. Rev. Sci. Instrum., 80(5): 055106. [17] Chen, G., Liu, X., and Du, Y., 2011, Elliptical-arc-fillet flexure hinges: towards a generalized model for most commonly used flexure hinge. ASME Trans., J. Mech. Des., 133(8): 081002. [18] Timoshenko, S. P. and Gere, J. M., 1958, Strength of Materials. New York: Van Nostrand. [19] Nisitani, H., 1978, Solutions of notch problems by body force method (Edited by Sih, G. C.), Noordhoff, Leyden. [20] Ling, C. B. Stresses in a Notched Strip Under Tension. ASME Trans., J. Appl. Mech., 1947, 14, 275-280. [21] Ling, C. B., 1952, On the stresses in a notched strip. ASME Trans., J. Appl. Mech., 19, 141-146. [22] Ling, C. B., 1968, On stress concentration factor in a notched strip. ASME Trans., J. Appl. Mech., 35, 833-835. 18
[23] Smith, S. T., Chetwynd, D. G., and Bowen, D. K., 1987, “Design and assessment of monolithic highprecision translation mechanisms,” J. Phys. E: Sci. Instrum., 20, pp. 977-983. [24] Yang, R., Jouaneh, M., and Schweizer, R., 1996, “Design and characterization of a low-profile micropositioning stage, ” Precis. Eng., 18: 20-29. [25] Ashby, M. F., Shercliff, H., Cebon, D., 2007, Materials: Engineering, Science, Processing and Design. Butterworth-Heinemann. [26] Young, W. C. and Budynas, R. G., 2002, Roark’s Formulas for Stress and Strain, 7th edn. New York: McGraw Hill. [27] Durelli, A. J., 1982, Stress Concentrations, Office of Naval Research, Washington, D.C., U.M. Project No. SF-CARS, School of Engineering, University of Maryland. [28] Hale, L. C., 1999, Principles and Techniques for Designing Precision Machines (Chapter 6), Ph.D. Thesis of Massachusetts Institute of Technology. Also available as UCRL-LR-133066.
19