fixed node capacities and Z' represents the bufler overflow loss process .... promsion b, , u E A, and unit OD pair net revenue rw. w E IV, resulting from carrying.
Stochastic
Programming
Approaches John
Department
The
Scheduling
R. Birge*
of Industrial
and Operations
University
Ann Arbor,
to Stochastic
Engineering
of Michigan
Michigan.
USA
48109
M. A. H. Dempstert Department
of Mathematics
University Colchester,
Abstract
: Practical
outcomes vary. that
of those
scheduling
decisions.
Incorporating
approaches
formulations.
In particular,
gap in stochastic
Keywords:
*
stochastic large deviations,
This
8815101, 1 This of Canada Grants
that
author’s
under
390855
Grant
that
programs
programming,
work
in typical
the stochastic
was supported
A-5489
program
and by the UK
decision
difficulties
situations.
gaps
that
from
appear
may
all
programming
Our unifying
how views
the
in analysis
based on stochastic
structure
making,
and revenues
produces
We show
of scenarios
costs,
about
framework
different
levels
in deterministic
leads to a vanishing
Lagrangian
increases.
stochastic
scheduling,
queueing
net-
Grants
ECS
relaxation.
in part
and SES 92-11937. was supported in part
results
and duality
as the number
hierarchical
often
scheduling
framework.
full information
demand,
models
we present
nonconvexities
Lagrangian
without
performance,
stochastic
in a similar
3SQ
decisions
scheduling
In thii paper,
overcome
we show integer
turnpikes,
ECS 92-16819, author’s work
of ways.
CO4
require
availability,
into stochastic
of a decision can
typically
resource
of decisions
all aspects
approximations
duality
works
in a variety
to the hierarchy
us to treat
enable
Yields,
these quantities
may be addressed
allows
problems
of Essex
England
by the Xational by the Xatural Engineering
Science Sciences
and Physical
Foundation
and Engineering Sciences
under
Research
Research
Council
and K17897.
Journal of Global Optimization 9: 417-45 1. 1996. 0 1996 Kluwer Academic Publishers. Printed in the Netherlands.
417
Council under
JOHN R. BIRGE AND M. A. H. DEMPSTER
418 1. Introduction
Scheduling portant input
decisions
characteristics costs
evitability
involve
consideration
such as process
and eventual
revenues
of these uncertainties
et al [1982] and Righter The great solutions
use a form of an index
under
evaluation,
do not, generally,
these results
paper is to use stochastic for planning
Our approach
about
aggregate
determine
extend
overall
production
for current overall
availability,
in stochastic
with
product
varying’levels
scheduling
results
for known
certainty.
quality,
Im-
demand.
of certainty.
The
(see, for example,
and fixed term
stochastic
programming
on structural
results
in-
Dempster
[1981], Pinedo
settings,
especially
to near-term
operating
to explore
the relationship
in terms
conditions. between
(see also Dempster
we view the decision
process
as breaking
and scope (market); or services,
(2) medium-term. or fixed
impact
production.
or
of overall
system
Our interest
in this
broad system
results
operations. making
decisions
schedule
(19831, Shanthikumar
to decision
items
for optimal
to follow a fixed permutation
[1981], Glazebrook
for actual
approach
Scheduling
capacity
concentrates
useful in many
formulations
capacity
situations.
are not known
with
it may be optimal
directly
[1994]) .m which
about
quantities
literature
Gittins
are quite
fits into a hierarchical
decisions
decisions
conditions,
and short-term
et al 119831 and Dempster strategic
scheduling
programming
purposes
time, resource
interest
rule (see, for example,
While
that
and Shanthikumar,l994]).
certain
and Yao [1992]).
quantities
processing
has promoted
of the stochastic
that show that,
they
yield,
may all be random
[in Shaked
majority
of many
orders:
(19821. Dempster
down into: tactical
(1) long-term,
or planning
operational
and (3) short-term,
on each level of this hierarchy
as well as decisions
on what
decisions
since they
or how to produce
may in the
present. Hierarchical hierarchy
can appear
solution.
In thii paper,
and show how that Our results example.
in the same model we explore
approximation
are consistent
Bertsimas
[1994].
different
provides
a unifying
to allow for various
These
other
methods
types of approximation
may aid the overall with
framework
attempts
decision
to unify
are most compatible
when
for thii
analysis.
of decomposition,
associated
.411 levels of the approximation
and
with each level of the hierarchy
process.
stochastic
and dynamic
we take a long-term
optimization
as in. for
view of design
decisions
PROG RAMMING
STOCBASTiC for overall
performance
approximation trafhc
APPROACHES
and capacity.
in this section
deviation When dominant
fluid, queueing
(see Dempster,
theory
In Section
can reduce
level capacity
concern.
In Section in a convex
provide
Birge and Dempster
a turnpike
from
result
approach
approaches
to the general scheduling
difficult
are necessary.
In Section
4, we show
(see Takriti.
number
of samples
2. The
Strategic
Following
Birge
in fact,
mathematical
Level
Queueing
and
and computer
hierarchy.
it becomes
involved
at succesively
with
increasingly
reflect
lower levels reflects of classical
physics
production
a
decisions
setting.
for this problem
We then
and provide
a match-up
scheduling
in Bean et al (19911. the effects
method
small duality
of nonconvexities.
gaps.
approach
In this
relaxation
approach
has been used in power Extending
results
actually
decreases
to the stochastic
(see. e.g., Dantzig with
problem
from
system Bertsekas
to zero as the
increases.
[1963]) in the context
models
at the macro.
in plannin,, o- management
and control.
the classical
and operational detailed
when
becomes
Approximation.
decision-making models
This
and large
scheduling
how to use a Lagrangian
setups.
science has been concerned
medium-run
models
to eliminate
procedure
ideas of G.B. Dantzig
corporate
tactical
with
systems
from
problem.
production
also justifies
Our
by heavy
We use an example
deterministic
hierarchy
This
gap in this relaxation
approximation
long-run,
mathematical
the duality
in a discrete
the original
to support
problem
and Long [1994a])
that
from the 1940’s management detail
for deterministic
level.
how this approximation
conditions
schedules.
making
for this in a planning
(19921 to give optimality
it is often
[1994].
to a simple
We give some justification
was discussed
scheduling
Dempster
level of the decision
cyclic
decision
effects are well approximated
are set, aggregate
level however,
stochastic
(19821, we show,
this
for optimal
which
At an operational case, other
model.
and conditions
to disruptions,
program
and scope decisions
can be approximated
scheduling
119953) to illustrate
stochastic
3, we study
this strategic
approximations,
Key and Sledova
a complicated
higher
results
2. we explore
is to assume that operational
fluid, or Markov-modulated
telecommunications
419
three-level
short-run.
and involves
As decision-making
- paralleling
in complexity
Integrated
moves
the macro,
levels of
hierarchical
concepts
of strategic
down
uncertainties.
at each level.
logistics,
meso and micro
planning
many more, but smaller,
these differences - increasing
military
of military
the corporate The modelling
meso and micro
In a stationary
scale
corporate
JOHN R. BIRGE AND M. A. H. DEMYPSTER
420 environment,
operational
become
extremely
models
tend to become
which
planning
complex.
are critical
models
In a highly
simpler,
- involving
dynamic
(see Table
Strategic Tactical Operational
1. Strategic
and tactical
stable
environment
in order
Many
problems
and Mandelbaum
[1991],
planning
active
[1993], Bertsimas
119941 and Garbe
In this section
of time
and space scales
systems
with
the reader
(19941 for more aggregated
that
(Here
details.)
to a simple
Using
For practical
applications
the resulting
approximation
and operational hlarkov-modulated a hierarchical Dempster,
of hierarchical
Key and Nedova
central
[1991]),
decisions
planning
[1995])
models,
the occasional
planning.
are appropriate.
which
model
random
(treated
and
;\Iandelbaum
planning
uses large deviations
and
Dempster
stochastic
is often
influences at this
strategic
theory
queueing
these queueing
[1991]
this aggregation
in Nedova
by changes
model
is
too strong
in
purposes.
For modeling
in detail
rules can be
for open
operational
extraordinary
We illustrate
index
- level regarding
the complex
however,
and NirioMora
event uncertainties and modelling
meso - tactical Chen
simple
(19851, Chen
of the behaviour
Bertsimas
in which
operational
level strategic
theory,
the study
(see, however,
of minor
limit
in a
at the operational
(19801, Harrison
although
[I9951 for situations
[1985].
by aggregation
are modelled
and Shanthikumar
the intervening
on strategic
planning
uncertainties
change.
is in its infancy
to Harrison
ignores
and computer
rarer major
and uncertainties
fluid flow model for strategic
flow models
telecomunications
to macro
functional
level considerations fluid
Buzacott
the aggregation
we ignore
deterministic
- can
T I
complexities
[1995] and Kelly
policies
is referred
involving
and telecommunications
and Glazebrook
appropriate
finite buffers.
approximations;
scheduling
we first outline
functions
Uncertainty
emironmental
logistics
Sethi and Zhang
with
justified).
levels handle
(see, for example,
of these systems
decisions
1 Macro 1 Meso 1 Micro
I
to focus on rare major
system
and control
useful mathematical
Complexity
i
in manufacturing,
level by open queueing
environment,
and tactical
cost
T I
Table
management
1).
Lead Time Level 1 Level 2 Level 3
uncertain
as it is the strategic
for survival
mainly
tactical
meso-macro
planning [1993],
to produce,
of extreme
from
boundzy,
at this level with Dempster
[1994]
the original
and
chance-
STOCHASTIC
PROGRAMMING
constrained
stochastic
for network
dimensioning
and scheduling other
Consider (with
finite
its output
formulation.
and traffic
balancing
The section
buffer
capacity)
time processes
node.
arbitrary
independent
for the system. service
on link (j, k) after
This
ratep,
service
stationary
and the
sources
indicating
model
for fast real-time
routing
muting
for queueing distributed
of thii approach
fractions
process
that
arriving
at a node with
rates A, at nodes j = 1,.
coordinatewise
1. Example
networks
from
to
input
the long-run
a full buffer
average
are lost to the system
. , J is the m aximum
solution
of a Three
minimum.
Node Nehvork.
of the
limiting
- the
directly
process
arrival
total inflow
rate
to node k
The corresponding
of the system
trafic
and service
by an erogenous
that are routed
performance
A) of nodes
119751 and Kelly
inter-arrival
(long-run)
is characterized
G(N.
each node on each of
are Kleinrock
equilibrium
pjk of particles
A’ = A;, + (A’ A p’)P, A denotes
graph
of particles
exogenous
of a dynamic
stochastic
an arbitrary
at node j on each of the J := IN] nodes j in the network.
(Ah, p’. P) specifies
Figure
programming
some extensions
networkon
random
identically
stitching
triplet
where
mathematical
can be used as a framework
queueing
to the existence
vector/matrix
arrival
deterministic
by briefly
arcs, with
(Classical
at each node subject
X8, a potential
input)
and (directed)
to each other
We assume
particles
which
concludes
now an open (i.e. exogenous
distribution
a simple
contexts.
links
[1979].)
programming
algorithms.
scheduling
421
APPROACHES
row
and - assuming vector
A’ of
total
equations
(1)
JOHN R. BIRGE AND M. A. H. DEMPSl??R
422 An example with
output
node.
particles
Arrivals Since
network
of this
from
which
is defined
appears
in Figure
the random
encounter
the network has m(P)
network
routing
full buffers
is open,
the muting
the integral
occupancies.
Not
supported
equilibrium
queue
surprisingly.
it may
trafic
length
it may
represents
be shown
the difference
and the equilibrium
lost
that
process
X’ and P completely
B’ is the constant
:= (Ql(t).
process
process,
subject
nondecreasing
Q’ and B’ - Q’ respectively A basic probabilities
representation and a single
arrival
X,” combine
rate A, at each
radius
a(P)
< 1. ( A closed
to be p, := Xi/p,
and node j
: t 2 0)
representing
that
the macro
:= (X,(t),
to empty
the network level fluid
from
in terms
node
(i.e.
approximation
fixed
a.s. nonnegativity 0 (the identically
of the potential
. ,X,(t))
buffer
and server)
of this
process
is
net throughput
process
: t 2 0).
cumulative
input
and potential
output
processes,
nodes)
:= (Yl(t).
the system
representing
to the appropriate and increase
P has spectral
. , QJ(t))
the equilibrium (due
specify
process
rate
if pj < 1. Let
,YJ(t))
ss a&vt
Q’ = X’ + [Y’ - z’(I
where
with
the overall
at node j is defined
Q can be expressed
between
output
to form
arrivals
nodes.
Y’ := {Y’(t)
Together,
matrix
intensity
be shown
X’ := {x’(t)
which
pzjpi,
if p, = 1 and a nonbottleneck
on the set of bottleneck
Moreover,
rates,
transition
Q’ := {Q’(t)
denote
with
case, external
are lost to the system.
= 1 and X6 := 0.) The
to be a bottleneck
1. In this
: t 2 0).
surely
- p)]
zero process)
the unique
solution
of
i_ B’,
node capacities conditions
(as.)
(2)
and Z’ represents and the requirement only
when
the bufler that
overflow
loss
Y’ and Z’ are as.
the corresponding
coordinates
of
are 0. of the identity realization
in (2) appears
of the processes.
in Figure
In this figure,
2 for a single we assume
that
node
with
the system
no branching has no buffer
STOCHASTIC
PROGRAMMMG
423
APPROACHES
‘;‘,l-li
Q=Queue Length JY=Lost output
JEBuffer
Figure
2. The Queue
so that
the maximum
the potential
when
The conditions be pathwise
Process
queue length
net throughput.
be added whenever be subtracted
Length
the as. (OW
defining unique
of the Input
is one. The difference
X. To obtain
the output an arrival
in Terms
is limited
and Potential
between
the queue length
due to the empty
is lost due to the buffer the queue length
process
state.
Processes.
and potential
The buffer
overflow
output
process
process.
process.
is
Y. must
2. must
also
limit. maq- be neatly
summarized
4’ := X’ + [Y' - Z'(I
- p)]
Y’ 2 0’
Q’ 2 0’
Z’ 2 0’ = 0’
Output
Q. the lost output
solution of the linear order complementarity
Q’ A AY’
Overflow
the input
process.
1
problem
5 B'
[B’ - Q’] A AZ’
by observing
that
Q’ must
(see e.g. Dempster
[1994])
(3) (-I) = 0
(3)
424
JOHN R. BIRGE Ah’D M. A. H. DEMPSTER
posed in the Skorohod
space of left-limited
Here we note that
t.
of the jumps
It follows
Thus
that
(OCP)
queueing
system
functional
deterministic
a complete
numbers
e.rpecled queue
and AZ’(r,)
process
fluid flow.
7’ and expected buffer
by the scaling
This overflow
g’ emerges
v
denotes
istic version nodes,
coordinatewise
of (OCP).
rates at bottleneck Notice
that
individual
behaviour
accelerating
processes
by the deterministic
expected
nodes or changing expected
routing
(3) and (4).
finite
buffer
open
flow.
level in the a.~. limit
2’ and driven
decisions
the inequalities
nt and applying
(see e.g. Chen and Mandelbaum
increasing
to strategic
t,, r, up to time
time by the scaling
by a deterministic
maximum.
epochs
of the specified
particle
flow is regulated
above,
at this macro
at jump
satisfying
stochastic
at the strategic
As mentioned
as is appropriate
c AZ’(r,) r.S(.)
processes
X’/n,
for stochastic
T? := {T(t)
where
of time.
processes
of the equilibrium
level of equilibrium
of particles
2’ =
the least element
law of large numbers length
and
of the respective
description
at the operational
Aggregating suitable
AY’(t$)
c AY’(t,) hI) and
426
JOHN R. BIRGE AND M. A. H. DEMPSTFX
Dempster, traffic
Key
and Medova[1995],
management
constrained recourse
terms
cost function
stochastic
Applications
programming
formulation
the chance-constrained
approach
of acceptable
blocking
in a very
much
Similarly,
in manufacturing
formulations
more
cells
graph
G(X.
or megabits
specified
traffic
per regime.
allocate
link
capacity
network
from
origin
the stochastic
a model
offered extended capacity
to destination in terms
to the net>vork. to (level)
of total
convex
Sledova
we consider
network
can either
time-scale
context. stationary each
dimensioning
penalties
tr&c
OD pair
bit flows
we treat
a linear
cost functions
and hloise
(OD)
pair
p E P,,
the recourse
network
in
results
formulation.
delays
for recourse
topology
trafic
flows
w E W in the problem
net revenue
but the arguments
and to the proxsision
OF node
represented f,
(in packets.
network
we shall
a set of specified
the expected
objective.
expressed
and usually
for shipping
cell or bit)
management
fP on paths
the alternative
form.
(packet.
and traffic
with
of a chance-
considerations
than
once more a fixed
origin-destination
planning
the optimal
form
layers of the network
incorporate
stochastic
equivalent
(GoS)
of the problem
consider
In particular,
in Sen et al (19921 and Bai et al [19!Uj.
to gmde-of-service
node W, so as to optimize
For simplicity.
separable
(see Dempster,
Specifically,
network
a certainty
of the chance-constrained
C,,. a E A, and route
traffic
is natural
representation
between
solving
been given
computational
A) and consider
for more details.
to telecommunications
level constraints
The
from
at various
systems,
second)
result
have recently
To see this in the telecommunications by adirected
is referred
or loss probabilities
compact
or use service
the reader
h of (7) will
program.
stochastic
In general,
to which
consider
routes
occuring
given (switch),
during
through from
below
a
is to the
carrying
can easily
as weI1 as link.
!1995j).
the chance-constrained
P-level
problem
(9)
STOCHASTIC
PROGRAMMING
427
APPROACHES
fp > 0 as.
The objective promsion pairs.
(9) of this optimization
b, , u E A, and unit The
first
chance,
or probabilistac,
flow f,
probability
gcalt. The probabilistic traiiic
(12) requires
flows
of products,
P,
paths
includes
In the pacities chance
D,
result which
D,
is specified
(approximately)
the stochastic just
at the rate
requirements.
Then
and capacity
allocation
constraints
variables
are usually
which found
flows
above
which
carrying
traffic
each (directed)
between
of offered
not exceed
call GoS gcdr must
assume
constraints form
situation
OD
stochastic
OD
the GoS for call re~twrl
be maintained
for the sum
link a E A. The
that
where
product
constraint
W’ corresponds
w, and C,
operational
CO a set
represents
level sequencing
involvin::
random
meet the probability
traffic
variables
fluid
flows
of Medova
min
[1993].
OD
capacity
effects
pair
would
demanded
It is well known problem
equivalent
as nearly
that
which
as possible.
is obtained written These
variables.
large deviation
theory.
fp, p E P,.
‘IL’ E IF’. which
represent
deterministic
f, would equivalent
begin of our
in
equiv-
However,
from
flows
ca-
a linearly
constraints
of the random
derived
of the stochastic
the (approximate)
with
distribution bound
the
equivalent
restrictions
the joint
fluctuations
subject
to approximate
(10) and (11) exactly.
fr, by deterministic
problem
bound
has a deterministic
by inverting
we can formulate
(PC.%)
must
to complete
deviation
by a conservative
traffic
(PCA)
routings
use a large
of the above
the probabilistic
constraints
replace flows
problem
of deterministic
alent
we shall
cost of link capacity
capacity.
meet the probabilistic
constrained
by replacing terms
below
level D, that
from
the unit
the probability
to the manufacturing
production
overall
that
passin, * through
At this level, we would
in reducing
representing
flows
analogous
alternate
and machines.
not be significant
of traffic
is completely
capacity
(11) states
on the set Q, of all paths
(9-12)
(10) states
demanded
constraint
coefficients
rw. w E IV, resulting
constraint
a specified
the a.s. nonnegativity
Problem
of both
exceedin,o
contains
net revenue
OD pair
pair traffic
of offered
problem
(12)
w E w.
P E Pw
to exceed problem
if
we may traffic call
GoS
as the path
viz.
(13) to
(1-I)
JOHN R. BIRGE AND M. A. H. DEMPSTER
428
This sistent
model
with
dimensions
the specified
w E W, developed GoS criteria
specified
by the PCA in which
allocates
Theorem
1.
accuracy
Remark.
both
the Bahadur-Rao Proof
First
the Chemofl
where
O-l incidence
bound. consider
constants
bound is given
the logarithmic
more
problem management
level (second
all specified
OD
and links.
in compact
using
the
and. under
traffic
P{f,
2 D}
linear
format
bound
refined
of the
least
appropriate
f,
between
stochastic Key
(g)-(12)
employed
large
stage)
pairs
in the
For jzed
instantiated
Poisson
problem
deviation
[1995]
specified
jlows
gwen
to derive
assumptions.
and Nedox-a
an arbitrary
mth
progmmmzng
deviation
(see Dempster.
offered
problem
equivalent
of the large
can be obtained
the total
and the lower
on all paths
with
programming and traffic
D,.
link using
proposition.
programming
deterministic
on the tightness
reducing
planning
con-
bandtidt/~~
are also consistent
between
traffic
(bandwidths)
e&&w
The linear
flow problem
in the following
stochastic
theorem
traflic
stochastic
rates
matrices.
discussion
the
networks
net&xk
equivalent
flow
multiservice
link capacities
is a multicommodity
has an approximate
We establish but
problem
the above
depends
dimensions
deterministic
The chance-constrained
dom call muting
deterministic
GoS for its corresponding
stage
the multilayer
layers of the network.)
is a 2-level stage)
at the maximal
[1995] for ATM
and cell timescale
(13)-(16)
traffic
(In fact,
and hIedova
level (first
and arc-path
We summarize
Key
(approximate)
the second
OD pair-path
bound.
model
and routes
call GoS.
at the burst
so as to maintain
capacities,
whose
individual
the strategic
and routes
network
capacities
in Dempster,
stringent
model
link
and ran-
by (13)-(16)
it.
bounds. tighter
the bounds.
Chernoff such as .
for references).
OD pair
w E II’.
Recall
that
by
generating
function
4 exp
pr,,
of f,
{-max,[sD
is defined
- pf,(s)]}.
(17)
as
(18)
STOCHASTIC
PROGRAMMING
Rearranging
(17) yields -In
and consequently
429
APPROACHES
to approximately
P{fw
invert
2
D)
5
m=slsD
the constraint
-
(lo),
fir,(s)1
taking
account
of (8), we must
solve
(19) to obtain
(20) for the optimal
s* in (19),
and the corresponding
deterministic
constraint
(21)
fw 5 Dw.
If we assume
and
that
p E P,
each with
that
arriving
probability
is the deterministic
the stationary
particle
fp/fw,
equivalent
traffic
(call)
flow f,
of the Poisson
then
it follows
of (lo),
since
has a Poisson
flow
f,
distribution
is independently
with
parameter
randomly
pW, that
routed
on a path
that
(23) Moreover,
provided
since
UJ E W was arbitrary,
we have that
that
P-1)
a E A, since
it may
determined
be shown
that
by the Chernoff
for sufficiently bound
small
are additive.
~~~~~ (typically
10e3 or lOed),
the effective
bandwidths
D,
i.e.
XI”,4 = Dw,
(25)
430
JOHN R. BIRGE AND M. A. H. DEMF’STJZR
(see Hui and Karasan This
theorem
the most Markov
[1995]).
Hence
can be extended
important
fluid
the (PCA)
calls based on stochastic
knapsack
Since Theorem
1 applies
can be used to study decisions setups,
routing
negative
model provides and bin packing
to the basic queueing
shop layout.
factory
machine
Tactical
Level
decisions
centres.
mixtures
holding
network
involve
operational
of (11) as required. network
planning
of independent
times
Poisson
(see Dempster,
for real-time
.
routing
Key
perhaps streams
and
and rerouting
of
Sledova of actual
models.
problems
between
traffic
a framework
planning
while
equivalent
For telecommunications
exponential
hierarchical
might etc;
of ways.
is to multiservice
calls with
119951). In this context
sizing,
in a number
generalization
modulated
tactical
(24) is the deterministic
in, for example, and machine
would
We consider
model treated
involve
tactical
earlier,
flexible
centre
it (and its generalizations)
manufacturing.
product
capability,
work-in-progress
level decisions
Strategic machine
scheduling,
on overall
and centre
processing
production
and
in the next
section.
3. The
The example planning.
the timeliness
of order
first
appropriate
Our approximation convexities
setup model consider
optimization
only aggregate
fulfillment.
At a lower decision
methods
models
[1979]. Rockafellar
through
time model appear and Wets
framework
production
production model
system
service
(for example. to many
constraints.
This
appears
large enough
the model
[1983] and Hiriart-Urruty
F&m
[1983.1985]. [1982].
without
capacity
consideration
of
more important.
We
daily or monthly)
decisions.
scheduling
models.
in which
a good
approximation
that
gives
a continuous and Dempster
in Sole1 (19871 (see also Dempster
[1988].
considering
becomes
model
in Birge
that allows us a wider class of problems. in Dempster
requirements
in contrast
we follow
time model
of a manufacturer
levei, the time element
disjunctive
In this section.
to the continuous
a discrete
for aggregate
the production
can apply.
is similar
fits the strategic
considered
appear
level where
conditions
section
Approximation.
is based on a convex
immediately
at a tactical
Convex
of the previous
The analysis
consider
and
Related Kushner
approximation ([1992,1995]).
and Sole1 [1987]) results
[1972].
non-
to Our but we
for gener,al stochastic Arkin
One of our main results
and Evstigneev
in this section
con-
STOCHASTIC
PROGRAMMING
terns turnpike models
optimality
which
in, for example,
Sethi
To set the stage probability
space
measurable
function L”,
Associated
with
process
(Q, C,n).
in the deterministic
model,
the data process
A fundamental
is a filtration
of the decision
time t, i.e. xt must
be Et-measurable.
that xt = IE{xt]&}
almost
the o-field
Ct. Using
process,
w :=
a decision
process
z := {.q
n x #: W’), where
surely
(19761 and in stochastic
the projection
where
at time t is that it must
operator
: t = 0,
.} such that
Ct := e(wt)
process
is the u-field
I is a bounded measure.
of the history
.. C C.
characterization
., where
.} in a (canonical)
set and # is counting
C Co C
t = 0..
: t = 0..
is the space of essentially
(0.n)
An alternative (a.s.),
processes
{or
P is the power
IF := {C,}g”,,,
and the Ct satisfy
property
a data
The space of the decision
x N, C x P(N),
,~t}
case may be found in McKenzie
we assume
We also assume
z : w c-) z(w).
wL := {we?.
431
et al. [1992].
for our
:= L,(R
functions,
APPROACHES
only depend
of thii
nonanticipatzve
IE{.]C t } IS . conditional
Ii, : z c rrt.z := lE{z/C,},
t=
on the data up to
expectation
0,.
., on L&.
with
property
is
respect
to
this is equivalent
to (I - &)I,
We let h’ (Us. III,.
denote
.) the projection
Our general
where
the closed
“IE”
operator
optimization
denotes
and ft as functions
linear
model
expectation
subspace from
of nonanticipative
Lk
(35)
= 0, t = 0..
processes
in L”,
and denote
by II :=
onto N.
is to find
with
respect
of w, i.e. as random
to X. We use the notation
entities.
Expression
x1 and f, to denote
respectively
zt
(27) then becomes
m
(28)
inf,e.\.IECft(xt,~t+l)~
t=0
with
objective
F(x)
We assume [1976])
with
:= IE cz”=,
fi(xt.
xt+r).
in (28) that the objective
the following
additional
components
property:
f, are proper
convex
normal
integrands
(see Rockafellar
432
JOHN R. BiRGE AND M. A. H. DEMFSTEX
Assumption (Lk)‘,
1: For any y = (x L, x t+l),
the Banach
there
exists
y > 0 (independent
of t) such that
for x E at,(y)
c
dual space of L&,, and for all w, either
Of
(b) there
exists
z such that
?r E aft(z)
and
ft(z) for all t-2
0.
Note that
uniform
convexity
implies
We use this more general
which
involve
linear
We present
the main
results
In general, (~0, xi,.
may
results
does not exist
from
of cyclic
the objective
nonstrict
it allows
convexity
involving
us to use the common
a van IXeumarm
scheduling
objectives
and Dempster
[1992] on optimality
and the asymptotic
optimality
conditions.
of match-up
turnpike
strategies.
resulrs
The
proofs
in (28)
optimal,
is infinite.
as in SfcKenzie
We can ]1976],
avoid
this
difficulty
if it is not overt&n
by defining by any other
a policy policy,
X* :=
i.e. if there
x’ such that ’ ( t ( x,.x:+1,
- ft(x;.x:+J
5 --e.
(30)
t=o
c > 0 We also assume
present
in the sum
Assumption and ]]xl+r]] Given x*.
allows
there.
1imsupEk’f 7-m where
(29)
penalties.
Birge
policies
1:which
here because
and earliness
be found
.} as (weakly)
Assumption
assumption
tardiness
the optimality
of these
- y]]z - y]] as.
a
facet.
concerning
+ ?T(w - 2) 5 f,(w)
the
objective
functions
< c a.s. for xt+r -4ssumption
Thus
satisfy
a condition
ensuring
that
no infinite
terms
are
in (30).
2: For any t and 6 < co, there exists
By setting
0 in (28).
that
without
]]xt]]
< 6 a.s. implies
lE f,(x,,
x1+1)
equal
> --c I
feasible.
2, we can subtract
this constant
c < co such that
a constant
to the expected
loss of generality
we assume
from objective a finite
each f, without value infimum
changing
in each period.
the weak we obtain
in (28) in the sequel.
optimality
of
an infimum
of
STOCHASTIC
The terms
PROGRAMMING
first
result
from
Birge
These
price
supports
in (28).
decomposition
2. Suppose
(a) (nonanticipative of x onto N, (b) (strict
IIx,
,... },
to x’
is such
2 holds
that
any
and that x* is optimal
exist
prices
supporting
in the folldwing
the objective
theorem
that
allow
ft(xt,xt+l)
and
< co), the projection
f t ( xt,xt+~).
< co, there
exists
6 > 0 such that for
< 32.
E dom F,
There
e.&ts
(x~~.x$~+~,x$~+~
such
that
for
all Tk
in
and
the
is also feasible,
--t 0 as k -
1 ~~[fT~--l(xTI-l,xT~)+fr~(XT~rxT~+l)]~ initial
x’
,...)
+ fT~(xrt.x&h+l)]l
with given
injimum.
< 03,
such that E cz*=,
approximation)
x
in (28) with finite
such that E C;“=,
f,(II,x,,l&+,x,+,)
IJE[fT,-1(xr,-1,xT,)
X* is optimal
there
conditions
E dom F (i.e.,
For anyx
continuation for
(19921 is that the optimality
1Ec:of*(Y,.Yt+l)
E L&,
and;
fTk(xTk,x$,+l)]\ Then,
Assumption
For some x E N,
horizon
{T,,Ts
provide
is such that IEEE_,
feasibility)
(finite
Dempster
by time period.
feasibility)
all jJy - XII < 6-y (c)
and
of the conditions
Theorem
433
APPROACHES
some
sequence
transition
cost
M and ]lE[fr,-l(xTk-l,xTk)
+
fOrk=l,.... xc if and only if there erist
conditions
t = 0.. . , such
pt E L?(C),
that (i) pi is nonanticipative.
(ii) &(fo(xo.xl) %(ft(xt,xz+l)
- ~0x0 - ptxt
I Et+l}.and
(iii)
- xh)
The
-
optimality facet
asymptotically
optimal
initial
condition
- from
These
is as.
minimized
by (x*.x~+~)
Xi ocer x1 = lE{xl := (x;.x;+~)
1 C,},
and.
for
over xt = lE{xl
t > 0.
/ &}
and
az. for all x E dom F.
any given starting
optimal condition
up with a decision
chaqes.
Thii
results justify
.,
by x1 :=
(c) characterize
optimal
= 0,.
minimized
to match
then it is asymptotically obtain.
a.~. fort
is a.s.
0 as tk -
conditions
van Neumann
if that
+ ~1x1)
+ pt+lxt,l)
x1+1 = Wxtil
E plr(xtt
pt = E{p,j&}
i.e.
result
to return
the match-up
.
solutions
which
xg. The main implication
process
that
is optimal by showing
to an optimal
policy
policy
cyclic
a common
facet
of this result
for a specific
may be elaborated
scheduling
approach
initial
is that
condition
that if the data process
even if other
conditions
in Bean et al [I9911 and extend
- the it is even is cyclic
temporarily
the deterministic
434
JOHN R. BIRGE AND M. A. H. DEMWIER
results
in Bean
are also from
Birge
Proposition solutions initial
and Birge
1. (x;,
The
and Dempster
Given
x;+~)
condition
[1986].
in (ii)
in a variety
of Theorem
be an optimal
decision
ezists T < LY), such that. for
PIw
for the general
: inf(,;
.x;-, xx;
(a)
1 for
pt
process
stochastic
optimization
model
(28)
of contexts.
I and 2 and Conditions
that are minimal
c > 0 and 6 > 0, there
g results
119921 and apply
Assumptions
~0 and let x’
followin
- (c) in Theorem a set of optimal
given
the initial
2, let X’
supporting condition
be the set of
prices XL.
given
the
for
any
Then.
all t 2 T, * I - (Xt 7X*+1 Ill ’ E) < 6.
il(4.4+1)
(31) .
Theorem
3.
Under
the conditions
of Proposition
1, we may
+;+, jE~;[\(~;.~:+l)
ink;
conclude
- (x;,x;+~)//
that
-
0
as t -+ co,
a.s.
(32)
. For Theorem policy
for some
determination
3 to be fully initial
is simpler
needs to be analyzed In this that
some
is assumed operator define
TkC,
that
f,+k(Tr.x,.
xt+k
= Tkxt
with
Tkw
:= Ct for Tkx,+l)
t
= w’ such = 0,
of matching qclic
a similar
approach
i.e.
that
an optimal
can be implemented.
In this
and Evstigneev as
(see Arkin
p is invariant
WI := q+k,
a.s., where
are optimal.
to .4rkin
case, only
with
This
a single
cycle
assume
.Xn alternative
is to
The data
process
to the k-period
forward
= i*rt+k
as.
that
that
the objective
:= z~(T~Y).
. ,L,,&.
\Ve first
respect
= Tki~*
TQ,(w)
[19i’91.
and Evstigneev).
i.e., ut
. k - 1. We also assume
= f,(xt.xt+r)
strategy
~0 can be interpreted
k if the measure
for determining
policy.
of the data process
that
a method
up to that
policies
optimal
property cycle
that
like to have
the turnpike
tail.
of hlarkovian
to be cyclic Tk where
if we can show
has a left
we would
the policy
we follow
process type
so that
to determine
development,
the data
assume
state
applicable,
is invariant In this
context.
It follows with
respect
x is a cyclic
shifi
we may to Tk so policy
if
as. and (25) becomes t-2 inf,e,v:IE(C
fdxt.xl+i) t=0
+ fk-l(xk-.l.Tkxo)).
(33)
STOCHASTIC
PROGRAMMING
1.
Corollary
exists a weakly
Given
conditions
(a) - (c) of Theorem
optimal
policy
with cycle k for any initial
As an example eral commodities and random
of extending i = 1,.
due dates
with
in varying
amounts
ties,
p(i),
correspond
d(i),
{d(w.
i, I), d(w. i. 2),
order
for i arrives
Thus
Et distinguishes
each
item
xr+r(i)
(t
processes
(t
The
is not
= d(i.j)).
appear
single
a due date The
in an indicator
costs
is to minimize
period
objective
performed
for any
are constrained
The
total
contribution
with
sev-
release
dates
r(i)
random
the due date in which arrive
randomly
(d(i)).
The
dates
is defined
so that
and due date d(w. i.j)
process (according
random
{p(w. i. l),p(w,
,},
process
total
j = 1.2,...)
which
enci-
i. 2). when
. }.
the jth
are also known.
tardiness.
is thus:
considers
t
t.
Since
processing
or xt+r(i)
+ p(i.j)
can occur
one. Other ah resource
w, is charged
cost at time
period
the total
no processing is at most
A penalty
tardiness
i in each
due date,
so that
S(w. x1. xt+r)
the expected
data
on each item
are due to tardiness.
< 0).
due
on each item at each
# d(i.j)
function
after
a model
i. 1) for 1 5 I 5 j, but not for 1 > j.
in each period
in this model (xt(i)
(t
p(i),
i, l), r(w. i. 2),
. The
cycle k. then them
consider
for each item
time p(w, i. j)
requirement
decisions
and processing
i backordered
objective
The
t
if
processing
times
random
{r(~,
1,2..
then the processing
of processing
by the
< r(i.j))
The only of item
r(w, i,j),
number
framework,
period
orders
and with
with
I
processing
in which
of times,
data process
xg.
to a scheduling
to p(i)),
r(w. i, l).p( w, i. l),d(is.
is reduced
a due date released
t=
condition
of rut for every
a situation
to sequences
2 and a cyclic
to random
weight
(according
are the amount
- xl(i)
a penalty
, }, for each order
at
results
according
We wish to model
to r(i)),
Decisions
these general
, n processed
d(i),
ing is not completed.
r(i),
435
APPROACHES
given
in period - x((i) if an item
restrictions
of
t
is
if t is is not
on feasible
availabilities.
in each period
w is then
the state
C:=,
for every wi(-rt(w.i))+.
unit
436
JOHN R. BJRGE AND M. A. H. DEMF’STER
where
f;(xt(i),xt+l(i))
:=
I
This
noncyclic
model
Dempster
[1992].
identically
distributed
The tools)
data
for
assuming each
can process In this
model,
and that
process
< x7="=, l(t>r(t,j)}P(i,j) q(i) > 0 a.s.,
- l{t=d(i.j)}P(i-j).
of “0”
of the model
r(i,j)
< d(i,j)
i requires
a resource
one unit
m(i)
during
case. w1 can be interpreted
where
constraints
to a situation
to have
several
to which then
resource
certain
period variable),
group
fractions
production
if
~
;tt;g!sz
cyzl
cost
setup
include change
also entering
E {I..
. , M}?
if available
-xi(i)
cycle
- r(i,j),
otherwise.
k) in Birge
and
p(i,j)
and
are all
as machines. feasibility
For example,
the set of resources.
such
process
that
-
+
and
generally
by
and each
di
that
resource
if unavailable.
components
of resources.
xt(i)
labor
suppose
anything
the first
and unavailability
=
(such
to represent
and cannot
components
j
in this way.
convex
form
1Ve then
an
have
P(i)l(t=d(t)})
(35)
l.....Ar,
Our only
function,
could
a constraint
that period
the objective
set of variables,
commodity
(which
C:=,
might
s,(i,j)
as A,,
if relevant). if
x)
5 .~,(j)s,(i.j) C~zlst+~(Lj) C,=, !s,+,(i,j) otherwise.
(&+1(i)
-
xt(i)
can be broadened which
By
indicate number
indicating
further the extent
of machines. the total
in time and be an additional
We can also include
C:=,
/s,+l(i.j)
case. the indicator +
j),
6(w. . . .) is convex.
j is a large
times.
also vary
5 K,.
In this
st(l,
If resource
so that
0 :=
i.
is that
on feasibility
be set up For i at different
j by K,
in a single
requirement
this constraint
an additional
of resource
h(w. Xt. Xt+*)
term
l{J=m(t)}(xl+l(i)
j is set up to process of the group
d(i,j)
of the resources
xt and “00”
to availability
0
by including
capacity
we would
the maximum change
setups
xt+1(i)
7’
of an alternative
with
- xl(i)
P~OCCSS (with
+ 1) - r(i,j),
from
interval
can also be represented
As an example
r(i,j
m(i)
{ Other
4
data
the 6 indicator
a time
:=
cyclic
the availability
reached
of ones and zeroes corresponding
6(iJ,xt,xt*1)
5 xl+l(i)
< k a.s. for all j.
We allow
is feasibly
with
that
to determine
if xt+t
-l(f=d(,,j)}P(irj)
otherwise.
00
all commodities.
at most
M-vector
- l{t=d(i,,)}P(i.j).
0
5 c,“=l l{t>r(t,j)}P(i.j) xt(i) < 0 a.s., if c;“=, -l(,=d(,,))p(i,j)
it is assumed
is assumed
processing
process
if Cgl
is a generalization
In that
a value
--~+&i)
a convex
- s,(i, j)l of feasibility
5 Al
single decision
constraint (with
on
a setup
becomes:
P~i)l{t=d(4))
for i = 1.. 5 h;. - st(i. j)l
.n: j = 1..
,111. (36)
5 A,.
j = 1,.
. df.
STOCHASTIC
PROGRAMMlNG
APPROACHES
Note that this function processor, criteria
minimum
expected
for optimality
distribution
as quickly
value
at 4
noncyclic
Theorem
Suppose
IE~~=,,f,(x,.x,+i)
given
solution
solution
x’ given
To illustrate with
single
also assume policy
period that
is optimal.
d(sr. il,j(w.
t. il))
stability
(cf
of the objective
function.
problem.
the convexity
given
in Theorems
Assume
given 4.
disruptions
that some state
up with X* at the earliest
problem.
Essentially
assumption,
xb < g
and Dempster feasible
turnpike
119921, it is shown
mutatis
match
a.s. is the initial
t can be constructed
the same proof
it meets
and an optimal
To see this, let X* be an optimal
In Birge
is a basic multiplethe
2 and 3. In some cases, the stationary
path between
Bean et al [1991]).
schedules.
With
This model
mutandis
is
schedule
in
instead
of
state
that
with
point
a trajectory
f
the same objective
yields
this result
for the
problem.
4.
feasible
tardiness
a deterministic
trajectory
and matches
as x’ for the cyclic
current
follows
turnpike
Let x’ be an optimal
that starts
weighted
as possible
X, the set of optimal
the convexity
and asymptotic
for this model
achieved
4.
preserves
437
f
x*
is
optimal
G
2 $,
a.s.:
such that f = XL a.s., xb such
from
g
unth
ft defined
zn (34)
= xi
for
and ft
above
in
a.s.
the
tardiness
model,
and Lir in (35).
some
r < 3~.
Then
infxE~..xa=x;
find and
that
there
them
exists
a.s. exists
a
an optimal
that xi = x;. t > 7 a.s.
the use of this result. objective
(34).
this
5 d(kl. iz,;(ti.
we consider
a one-machine,
multiple
In this case. M := 1 and m(i)
1~1,:= 1 for i = 1.. To define
I
. n. n‘irh
policy. t.iz))
5
..
:= 1 for i = 1..
these assumptions.
suppose
that
r(z.
5 d( u‘. i,. j(w.
commodity
the familiar t. i))
i,j(&, t. i,))
version
. n. For simplicity.
earliest
5 t < P(J.~(w.
and define
zt+i
of the model we
due date scheduling t. i) -+ 1) and that
(w. ir) recursively
from
1 = 1 to 1 = n by: rt+lhil)
= dw,ir)
- lIt=d(w.lr.jfw.t.l~))~P(W.il,I(W.t.ii)) 1-I
+ l(,,(il=ii(min{l i l(t=d(d Equation
(37) then forces production
that have not yet reached
the order
- C(zt+i(c.i,) a=1
,x., j(;,t.t.)))P(d. to occur
quantity
6)
(37)
i,.3(~.t.i,)).p(u~.il.j(;.t.il)),c).
up to the machine p(~. il.j(&.
- zt(z.
t. ii)).
availability This
definition
in due date order implies
that order
on any items j for item i
438
JOHN R. BtRGE AND M. A. H. DEMPSTER
is always
completed
before
order
j + 1 is released,
i.e. that
x,(,,,)(i)
by allowing
due date order
to apply
also to previous
orders
Theorem
5.
solutzon
to problem
with
m(i) i.e.
An
:= 1, zu, := according
are charged
when
on time,
5 for due date order
jobs
but
2.3).
are finished.
the optimal
5 does apply,
Lemma
lastdue
i = 1,. . . , n is to process
of Theorem
only
of Theorem [1990],
1 for
incurred
objective
defined
according
is not valid
In such cases,
order
however,
switches
are not yet complete.
by (15).
to earliest
(even
111 :=
1, x0 :=
due date of &eased
times
if the weights
with equal weights)
the optimal
to shortest
if processing
It also applies
order
only
is optimal
batches
within
break
up jobs
is the critical
Processing provided
here
on the incomplete
small
the large
Bvailable
the initial
portion order
factor
jobs
system
regardless
order
processing
are ordered
follows
time
and due dates
follow
in decreasing
can
in our convexity
or that
on all released
jobs.
optimality
in Proposition
1 and Theorem
Assumptions
1 and
and the set of possible
in Theorem available the system
2 (nonanticipative when
an order
has sufficient in some
period.
T\e would
2 are valid states
0. and
items
in cases where due dates
if all jobs
first.
order
from
penalties
if all jobs
are late.
the same order
is accepted. slack
\\-e ,assume
assumption
The result
(see Birge
earliest
can
et al
due date to
according
is practical as they
to (37).
charges
are
if an order
is large
and
are finished.
This
ability
to
assumptions.
according
to Theorem
n-e can assume
5 provides
some point
that
this
a long run optimal
in time at which
policy
satisfies
solution
we have nonnegative
the conditions
for match-up
3. the costs
is at most note
The second
such that
because,
to the customer
like to show
since
feasibility).
This
be shipped
in due date order
is empty
of processin, - time
of each job.
processing
capacity
items
t. i) that
can be relaxed
date.
Due date
period
(28)
j < j(w.
assumption
to (37).
The result
complete
optimal
2 0 as. This
a unit that
are just
L1 -distance
this is possible
(b). strict
can be obtained (although
linear
from
the feasibility
condition
the objective
piecewise
with
the current
fixed state.
conditions
only
feasibility.
is satisfied
without
an optimal
depend
completely solution
increment
may
in each
For condition
(a)
on information if we assume using
that
all available
use all capacity).
STOCHASTIC The
third
from,
PROGRAMMING
condition
(c). finite
for example, With
up with
initial
in Theorem
items that
with
one reaches
excess
In these
solution chine
time
scheduling
however.
the stochastic
at some between
NP-complete the optimal (Birge
point
However,
is simply
0 with
with
negative
some
overdue
starting
inventory
inventory The
orders
corresponds
zero or positive
inventory
initial
as possible.
then
and the consideration nature
state
state
alternative
causing
initial
to processing
inventories.
The
whenever
any
result
is
the cumulative
at time 0.
to process
if downtimes
the same weighted
If that
downtime
all jobs. occur
weighted
finding
randomly
shortest
completion
with
processing
certainty
the optimal negative
when
a single
order
ma-
the machine
and occurs of jobs
exponential
time order
unavoid-
advantageous
consider
time
with
is often
provide
For example,
is known
then
variables
can frequently
problems.
to minimize
processing.
of discrete
of the problems
in deterministic
the objective
0 and the time
problem. order
during
a trajectory
Relaxation.
times
are not possible with
reach
for any
as quickly
up response
m to items
Lagrangian
setup
problem
period
match
the total
policy
position
as in the zero initial
level. distinct
that
inventory
proceedin,
than
and
4, the optimal
optimal
up to time t is greater
situations,
strictly
before
Level
we can at some point
to entering
The
state
characteristics
unavailable
correspond
t the same
Operational
Theorem
the empty
items.
inventories
At the operational able.
these
by time
capacity
4. The
4 would
for
negative
from
is that
state.
and following
the state
inventories
439
continuation,
inventory
assumptions
is to match
negative
horizon
the empty
these
states
APPROACHES
some-
becomes
interarrivals.
as in the reliable
is
an then
machine
case
et al. [1990]). Other
objective continuity problems These 79.1) which
beneficial function
types
of random
characteristics.
in input with
effects
variables
integer
implies
that
For example,
of the expectation
variables.
of results
problem
The applications
are reminiscent the expectation
parameters Van
inciude
der Vlerk
over random
of a nonlinear
jl99.51 surveys
parameters
of these results
of the classical
obtaining
Lyapunov multifunction
continuity quite
of the optimal
include theorem
problems
and other
general value with
conditions
(vector)
for
of optimization
fixed
order
(see. e.g. Youngjl969j.
of a random
useful
argument
costs. Theorem with
an
440
JOHN R. BJRGE AND M. A. H. DEMJ’Sl-ER
absolutely is that
continuous
(joint)
similarities
procedures.
of problem
This
Dempster
actually The
development
relaxation
approach
gap is indeed
gap declines Long
scheduling
As a general probabilities,
may have integer
where
X’
includes
any feasibility
written
as a set of linear
X’
c PT.
constraints,
is the set of scenarios we would
linking
typically
in solution
(see. for example. problems
by solutions
time stochastic
is that
to problems
programs
Birge
in bounding
and Long
electric
power
units.
of decision
points
and the total
scenarios
increases.
to continuous
of this
savings
In that
only
capacity
decisions)
the
that
the
and that
the average
(Takriti,
Birge and
and that
in this
methods. of scenarios
t. For decisions,
where
Our
apply
it is shown
a few scenarios
number
gaps.
which
results
over deterministic
time horizon
[199lb],
paper,
Computational with
duality
R = {d’,
. . . . w.“}
xi, i = 1..
we use a superscript
. N. we
i to indicate
becomes:
conditions
constraints
in Takriti,
and a finite
(u.‘. Our problem
and the only
&(i)
(in addition
provided
results
the model of (27) with a finite
respectively,
problems
increases.
[1982] original
significant
methods
for scheduling
gap in discrete
are close to optimal
provide
we postulate
yariables
function,
where
the solutions
p’, . . . , p”,
on scenario
of random
problems
model,
starts
warm
scheduling
can be exploited
solution
with
the duality
Bertsekas’s
to scheduling
outcomes
advantage
of scenarios
by the number
also show that
case stochastic
dependence
limited
random
of stochastic
A particular
of the results
to zero as the number
[1994a])
with
here follows
here is a generalization
Lagrangian duality
below, in fact, that
characteristic
of Lagrangian-based
separately
to zero as the number
approach
different
(19911).
can be solved
We show
decreases
basic
and Wets
problems
data.
across
Another
has led to a variety
[1988] and Rockafellar
with similar
is convex.
structure
observation
the integer-variable
type
distribution
such as integrality scenarios
on certain
are represented
through
components N.
of z’, f;
As noted
earlier.
is a convex N can be
such as
sharing have N(T
the same history
process
- 1)n of these constraints
as i at time t. If there are T periods (one for each scenario
in every
and period
STOCHASTIC
PROGRAMMING
APPROACHES
from
1 to T - 1). If we collectively
then
(38) becomes
441
write
min
these
constraints
as
P
subject
to
(39)
i = l,...,N,
z’ E X’, H’z’
= b.
g For an electric the set of units
which
then
have constraints
costs
also appear
constraints The tivity
power
ensure
problem
are in service in X’
to ensure
that
to place
that
all demand
is met.
This
approach
program
units
the variables
components
a unit
for setups
relaxation
as in (39),
and continuous
in F’
Lagrangian
constraints.
scheduling
can only in service
is to solve
2‘ have binary
to represent
produce
components
the amount
of production.
power
when
it is in service.
and to remove
them
from
a Lagrangian
to represent
service.
dual to (39) by relaxing
We
Objective The
linking
the nonanticipa-
has the form:
sup A
D
subject
to
D < D(X)
where ~~ject~o~~,~~~(;~’ D(X)
+ X=‘H’~‘] - X=b i= l.....iT.
:=
(10)
A$,’ which
then
decomposes
The following
result
into completely from
Bertsekas
independent
subproblems
[I9821 provides
for each i.
the basis for the duality
gap result
in the Lagranginn
approach.
Theorem
6.
If problem
(39) has a solution.
for
every
i, the set {(xi,
infP-supDL111;’
inf P = min{u
i vl3((rc.
:=
i=l......l. i = l......V.
and note that {w’
: u.’ =
(43)
g E RZKm
and 1 E !RQ, for example.
[t’y’.C’(y’)),y’
and 2 := eC,Z’.
u). (z. F)) E II: x 2
Then
such
E Y’}
and
we have:
that
u‘ = 9. z = I).
2’
:=
(2’
: 2’ =
444
JOHN R. BIRGE AND M. A. H. DEMPSTER
From
duality
theory
(see, fo! example,
supD
where
conv Next
denotes observe
= min{u
Km
+ 1 indices
E conv(W
we have that
x Z)
such that
w = S,L = 1).
(45)
hull.
con@’
use the Shapley-F&man
et al. [1976]),
i vl~((m,u).(z.v))
the convex that
Magnanti
x Z) = W x cav(Z).
theorem
to write
every
since
Y’ is convex.
I E conv(Z)
using
Now,
a subset
following
I(z)
Bertsekas.
C { 1.
1N}
we can
with
at most
such that
(46)
i E Bi~r(z)Z’. Now:
suppose
such that
C,“=,
From %’ E S,
((t5, a), (2, a)) E IV x cow(Z) L*ji’
= 9 and Cc,
Shapley-Folkman,
with
C’($)
0 + v = sup D and 2 = 9,5 = 1. Then
we have
g’ E Y’
= ii.
we also have some
7 C 11,.
, N}:
If/ 5 Km
+ 1, with
(F. i?) E conc(Z’)
and
i $ f, such that
N CC’(B’)+CD‘S’+Co’=supD. ,=I igi Xoa,
using
the approach
G’s’
= I’ and f,(s’)
in Bertsekas
cm
si
and our assumptions,
< ci’ + p’ + c for any L > 0. Thus,
we can obtain
we have found
for every
a feasible
i E 1. some S’ such that
solution
(0. S) for (P) such
that inf P 2 5
D'S' 5 sup D + c p'. 1=1 *ET
C’(ij’)
i 2
r=l which,
since This
f < 2Km
result
is only
the gap in Theorem a sampling
scheme
in each time period branching as follows.
nodes.
+ 1, yields valuable
the result.
every
(see Figure The
duality
I
in the present
6 goes to zero. where
C-19)
In fact.
scenario
context
this is the general
path
p’ :=
has weight
3 for an example). gap vanishes
if we can restrict
we then
in the limit
the growth
case. Suppose, &.
If each path
A/N
-
to o(-V)
for example,
have N = vT scenarios
since since
of li
has v branches
that
so that
we employ at each node
and K = (vT - l)/(v
0 as Y -
TX. \Ve state
- 1)
the result
STOCHASTIC
PROGRAMMING
445
APPROACHES
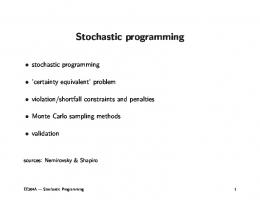
\ = Nonleaf node (K=13) v =3, T=3, N=27 0
Figure
3. Scenario
N = 27 scenarios, Corollary
2.
sup,(F’(~‘)Iz*
tree where
with
T = 3 periods
and K = 13 non-leaf
If
of
the conditions
E X1) - inf(F’(z’)lz’
(excluding
t = 0), v = 3 branches
at each non-leaf
vT.
(17
nodes. Theorem E X’)
7 hold.
I\:
=
that
vanishing
duality
the Lagrangian
procedure
must
gap result
duality
also have
random
variables
in this
course,
one must
still solve
the separate
in this
case. also indicates
that
This Repeated increasingly
result
deterministic accurate
holds
for other
gap for a problem zero duality
gap.
solutions solutions
with It implies
case - can indeed
simplify
deterministic
parallel
p’
< ~\f < IX. unzfonlyfor
processing
of deterministic as the number
general
schemes. obtained
- l)/(v
that
randomness
optimally.
may offer distinct subproblems increases.
The
result
in the limit
of the combinatorial
subproblems
of scenarios
11’ =
- 1).
and
(50)
sampling
in general
Lagrangian
&.
0.
any distribution
some
:=
all v, then
lim (inf P - sup D) Y--X
The
nodes.
also indicates of the sampling
- absolutely difficulties
in problems.
but no additional
advantages
continuous
gap is present
for stochastic
on separate
Of
processors
scheduling will yield
446
JOHN R. BIRGE AND M. A. H. DEMF’STER
Conclusion.
This
paper
has explored
ing problems
as part
proximations
yield
significant.
relaxation
a convenient
of optimal
methods
These
results
obtain
some
properties
many
other
for incorporating
hierarchy. model
lower
duality
effects that
level of detailed
gaps as stochastic
as separate
approximation
solutions
of the lower
and uses of optimization characterizations
level timing
At the lowest
a convex
rye showed
how
approximation
scheduling,
of the J-level Our
We anticipate problem
queueing
ap-
occasionally
-
that
useful
Lagrangian
sizes grow.
model results
that
schedul-
can yield
we showed
formulation
level objectives.
for alternate
into stochastic
are not - or are only
program
of parts
procedures.
and procedures
procedures
plannin, s level,
level, we demonstrated
policies. smaller
optimization
At the capacity
when
production
can all be viewed
incorporating
structural yield
of a decision
At the aggregate
characterizations
level
three methods
in (7) with
each higher
give some
this general
indication
of
framework
will
structures.
References.
V.I.
Arkin
and I.V.
hfoscow.
Evstigneev
(In Russian).
(1979).
English
Stochastic
translation
Models
by E..4.
of Contml
Medova
and Economic
and A1.A.H.
Dempster.
Dynamics.
Sauka,
Academic,
Orlando
(1986). D. Bai,
T. Carpenter
Technical J.C.
Report and
mated
ManujacturingFacilities,
J.C. Bean, release D.P.
SOR-9-1-I.
Bean
National
J.R.
and 5.51. hIulvey
Bureau J.R.
Birge,
dates
Bertsekas
Birge
(1986).
of Standards, J. Xttenthal
and disruptions
(1982).
Constrained
(1991).
Statistics
programming
and Operations
Match-up R.H.F.
Stochastic
real-time Jackson
to promote
Research. scheduling.
and A.W.T.
Princeton
University.
In Real-Time Jones,
network
survivability. August
Optimization
eds.. NBS Special
1994. in .4uto-
Publication
72-k
197-212. and C.E. Opemtions
Noon
(1991).
Research
Optimkation
XIatch-up
scheduling
with
multiple
resources,
39. 470-483.
and Lagrange
nlultzplier
Methods.
Academic
Press.
New
York. D. Bertsimas
(1994).
A mathematical
programming
approach
to stochastic
and dynamic
optimization
prob-
STOCHASTTC
lems.
PROGRAMMING
Technical
Institute
Report,
A unified
Massachusetts J.R. Birge
(1982).
J.R. Birge nical
Report.
mitted
24 , 314-325.
Dempster
Department
J.B.G.
Operations
.-WE
G.B.
Dantzig
and J.G.
S1.A.H.
of Management.
solution
in stochastic
for match-up
linear
strategies
programs
with
in stochastic
Engineerin,, = The University
fixed
recourse.
scheduling.
Tech-
of Michigan.
Sub-
Optimal
match-up
strategies
in stochastic
scheduling.
Discrete
Rinnooy
S’mu,I e machine
scheduling
subject
37, 661-677.
Logistzcs
.Assessing
Ran (1990).
the effects of machine
breakdowns
in stochastic
scheduling.
Designing
programs
approximation
with
recourse.
(19SO).
hlodels
schemes
for stochastic
optimization
problems.
Mathematzcal
Pmgmmming
for understandin,
Study
e fle.xible
27. 5-102.
manufacturing
systems.
12. 339-350.
Ann&
Dempster
Sloan School
bandit
1993.
and A.H.G.
Shanthikumar
A. Mandelbaum
(1963).
Report,
and multi-armed
7. 26i-2X.
Wets (19SSj.
for stochastic
bottlenecks.
(1995).
(19S8).
Letters
Transactions
and
Massachusetts
Research.
Naaval Research
Glazebrook
J.R. Birge and R. J-B.
Buzacott
Center.
polymatroids
Technical
and Operations
of Operations
J. Slittenthal
Research
in particular.
systems.
Optimality
of Industrial
breakdowns.
J.R. Birge and K.D.
Research
57, 105-120.
Frenk.
to stochastic
(1992).
Dempster
laws, extended
March
Programming
Mathematics
J.R. Birge,
to indesable
of the stochastic
and M.A.H.
Applied
Conservation
of Technoloa,
to: kfathematics
Birge
H. Chen
(1993).
The value
and h1.A.H.
and Operations
199-1.
approach
Institute
Mathematical
J..4.
March
and J. Nifio-Mora
problems:
J.R.
Sloan School of Slanagement
of Technology,
D. Bertsimas
447
APPROACHES
(1991).
of Probability Linear
Programming
(1988).
On stochastic
(199-l).
Hierarchical
Stochastic
discrete
flow networks:
Diffusion
approximations
and
19. 1463-1510. and Etiensions.
programming:
Princeton II. Dynamic
University problems
Press. under
Princeton, risk.
KJ.
Stochastics
25.
1.5-42.
SI.4.H.
Dempster
approximation
of telecommunications
networks.
BT
Technology
.I.
JOHNR.BIRGE
448
ANDM.A.H.DEMPSTER
12, 40-49. M.A.H.
Dempster,
Analysis
Fisher,
of heuristics
of
matics
M.A.H.
M.L.
Report
for stochastic
Opemtions
Dempster,
Research
P.B. Key
95-7,
L. Jansen.
J.K.
programmingResults
Lenstra
and A.H.G.
for hierarchical
Rinnooy
sceduling
Kan.
(1963).
problems.
hfathe-
8. 525-537.
and EA.
Department
B.J. Lageweg,
liedova
(1995).
of Mathematics,
Integrated
University
system
of Essex.
modelling
Submitted
for ATM
to:
Research
Telecommunications
Research.
M.A.H.
Dempster,
Reidel,
Scheduling.
M.A.H.
J.K.
Dempster
Lenstra
and A.H.G.
Kan,
eds.
(1982).
Deterministic
and
Stochastic
Dordrecht.
and E. Sole1 (1987).
Conference
Rinnooy
of the Bernoulli
Stochastic
scheduling
K. Krickeberg
Society.
via stochastic
control.
and A. Shiryaev,
Proceedings
eds. VNJ
Science
Jst
World
Press, Utrecht,
783-788. S.D. Fldm (1983). Report.
Fantoft,
S.D. Flam
(1985).
plications
R. Garbe
Asymptotically
Nonanticipativity
University
in stochastic
Glasebrook
Glazebrook Research
Glazebrook
(1995).
and scheduling
(1981).
Quarterly
K.D.
Glazebrook
of Kewcsstle.
Probability
K.D.
problems
of Bolza.
Chr.
Michelsen
Institute
programming.
Journal
of Optimization
Theory
and Ap-
46, 23- 30.
job selection
K.D.
to stochastic
Norway.
and K.D.
J.C. Gittins
stable solutions
problems.
April
Multiserver
Conservation Research
laws, submodular Report.
returns
Department
and greedy
of blathematics
heuristics
for
and Statistics,
1995. scheduling
of jobs with
increasing
strategies
in stochastic
completion
times.
.7ounmls
of .tpplied
16, 321-324. (1981).
On nonpreemptive
scheduling.
Naval
Research
Logtstics
28. 289-300. (1984). Logistics
(198i).
Scheduling Quarterly
stochastic
jobs on a single
machine
subject
to breakdowns.
in stochastic
scheduling
.Vaaval
31. 251-261.
Evaluating
the effects
of machine
breakdowns
problems.
STOCHASTiC Naval
K.D.
PROGRAMMING Research
Glazebrook downs.
(1991).
(1981).
J.M.
Harrison
On non-preemptive
J-B.
Hiriart-Urruty
in Engineering
A review
(1985).
functionals:
Emvnian
(1995).
Annals
(1972).
Proceedings
Sixth
Berkeley,
(1976).
Applied
Necessary
539-572.
problem
29. 646-675.
John
and
Wiley,
New York.
minimization
in discrete
break-
time.
of nonconvex
Probability
integral
and Mathematical
theory
for broadband
Boca Raton,
networks.
Florida.
Proceedings
of the Third
March
1995. F.P. Kelly
programs.
Stochastics
(1991).
Loss
1. 319-378.
Epiconsistency
conditions Symposium
Berkeley
Turnpike
theory.
of convex
for discrete Math.
Science
(1993).
(1986).
stochastic
and Stochastics
Stats.
parameter
stochastic
optimization 3. Neyman,
and Probability,
problems. ed.
In:
U. California,
(1983).
44, 841-861.
(1976).
Generalized
linear
programming
solves
the dual.
22. 1195-1203.
ATM
Single
of Michigan.
Econometrica
and %I. H. Wagner
admission
DS DZ/78303/DP/00029.
Pinedo
recourse
Conference, Probability
J.F. Shapiro,
Management
XL.
Research
with
667-685.
~Iagnanti.
University
Operations
scheduling
34. 83-92.
Kushner
J. Slittenthal
5, 77-87.
integrands
A thermodynamic
A.J. King and R. J-B Wets (1991).
E.A. &dova
of Lipschits
to the optimal
Sciences
Flow Systems.
and Stochastic
Extension
Telecommunications
networks.
T.L.
scheduling.
single machine
3, 19-36.
INFORMS
L. hlck’enzie
for stochastic
and Informational
Motion
(1982).
J.Y. Hui and E. Karasan
H.J.
policies
of production
Applications
Statistics
Reports
449
34, 319-335.
Logistics
Probability
SC. Graves
APPROACHES
control
December Machine Ann Arbor,
Stochastic
and routing.
BT Laboratories
Performance
Engineering
Report
1993.
Scheduling
Subject
to Random
Breakdowns.
Ph.D.
dissertation,
The
Xlichigan.
schedulin, 0 with
release
dates
and due dates.
Operations
Research
31,
450
JOHN R. BIRGE AND M. A. H. DEMFSTEX
ML.
Pinedo
and SM.
Science
26, 1250-1257.
R. Righter their
A.H.G.
(1994).
Scheduling.
Nijhoff,
Rockafellar
(1976).
Rockafellar
S. Sen, R.D.
543.
time.
H.M.
production
systems.
J.G.
Stochastic
Orders
and
Problems:
Cla.ssification,
Complezity
and Computations.
Normal
and Measurable
Integrands
Lecture
Selections.
Xotes
and stochastic
optimization
planning
random
problems
of Bolza
type
(1992).
Network
Department,
Q. Zhang
and J. Jiang
problems.
Mathematics
(1995).
Multilevel
(1992).
(1994).
of Arizona,
Turnpike
of Operations
hierarchical
and Optimization
Shanthikumar
University
with
Technical
December
sets and their
Report,
1992. analysis
in stochastic
17. 932-950.
Research
decision
demand.
making
in stochastic
and their
Applications.
systems:
Polymatroid
marketing-production
33, 529-553.
Stochastic
Orders
Academic
Press. San
CA.
scheduling E. Sole1 (1986). Dalhousie
and D. Yao (1992). and control,
Operations
A Dynamic
Approach
University,
J.R. Birge
Transactions
S. Takriti,
and J.G. Shanthikumar.
Management
10, 273-312.
J. Control
and J.G.
shocks.
CA.
Deterministic
Engineering
planning
SIAM
Poisson
Berlin.
and S. Cosares
Saner,
Shanthikumar
S. Takriti,
Functionals,
Stochasties
S.P. Sethi and Q. Zhang
Diego,
Scheduling
Springer-Verlag.
and Industrial
S.P. Sethi,
hI. Shaked
Integral
Doverspike
Systems
Press, San Diego,
Machine
to nonhomogeneous
13 in M. Shaked
and R. J-B. Wets (1983).
in discrete
jobs subject
The Hague.
in Mathematics R.T.
Chapter
Kan (1976).
Ffinnooy
Scheduling
Academic
Applications.
Martinus R.T.
Ross (1980).
Halifax,
Research
to Stochastic
queueing
stochastic
and optimal
40. S293-S299.
Schedulin, (J via Stochastic
(1994 a). A stochastic
Systems,
Control.
Ph.D.
dissertation,
programs.
model
for the unit commitment
problem.
IEEE
to appear.
J.R. Birge and E. Long (1994 b). Lagrangian
mixed-interger
structure
Nova Scotia.
and E. Long
on Power
Slulticlsss
Technical
solution
Report,
techniques
Department.
and bounds
of Industrial
for loosely-coupled
and Operations
Engi-
STOCHASTIC
neering, NH.
PROGRAMh4ING
University
van der Vlerk
451
APPROACHES
of Michigan,
December
(1995).
Stochastic
Lectures
on the Calculus
1994.
Programming
with
Integer
Recourse.
Ph.D.
The&,
University
Groningen. L.C.
Young
(1969).
Philadelphia.
of Variations
and Optimal
Control
Theory.
W.B.
Saunders,
of